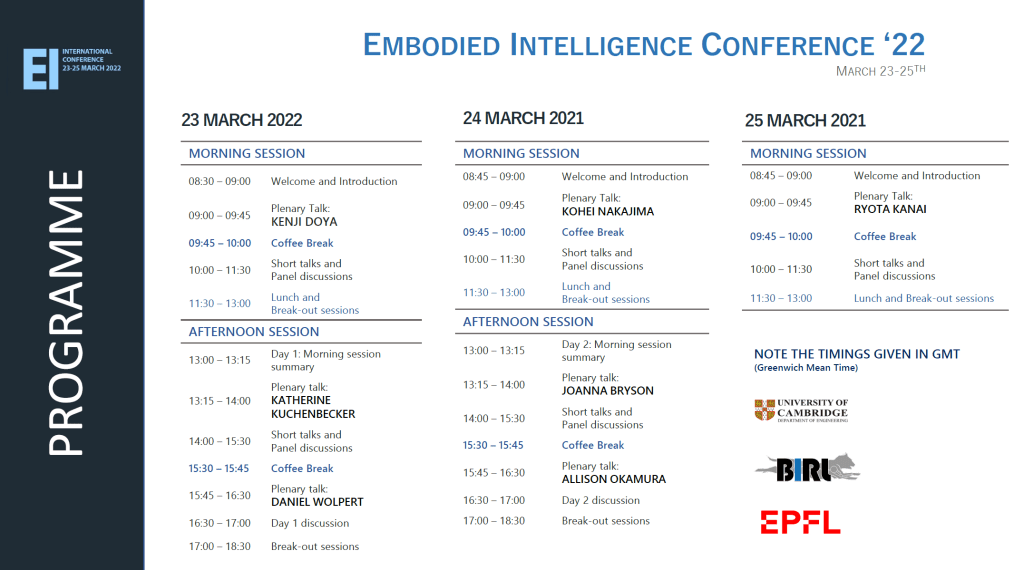
Here is a programme for the 2022 conference, all times are given in GMT (London). The abstracts for the plenary speakers are given below.
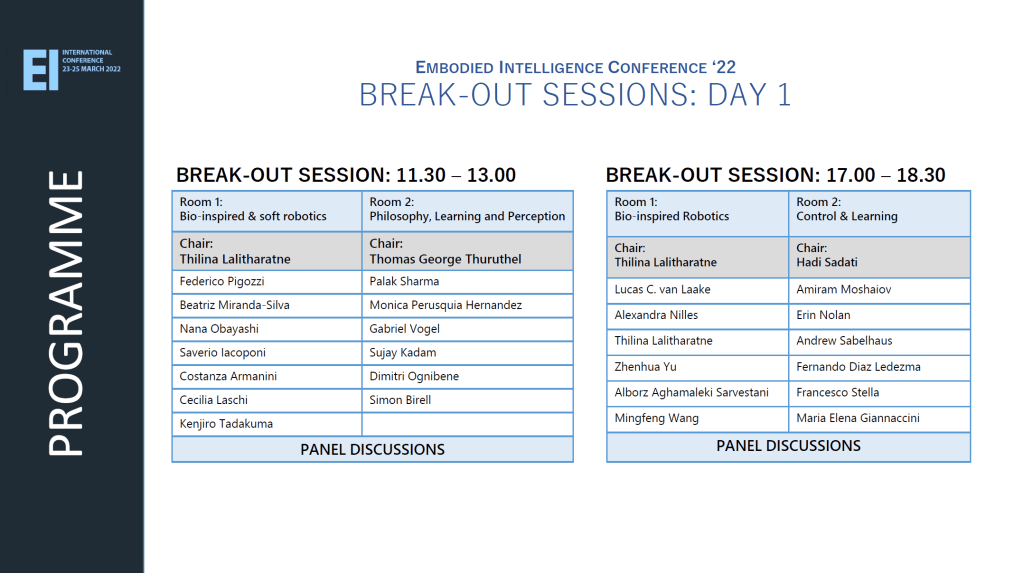
BREAK-OUT ROOMS SCHEDULES
DAY 1: PARTICIPANTS
DAY 2: PARTICIPANTS
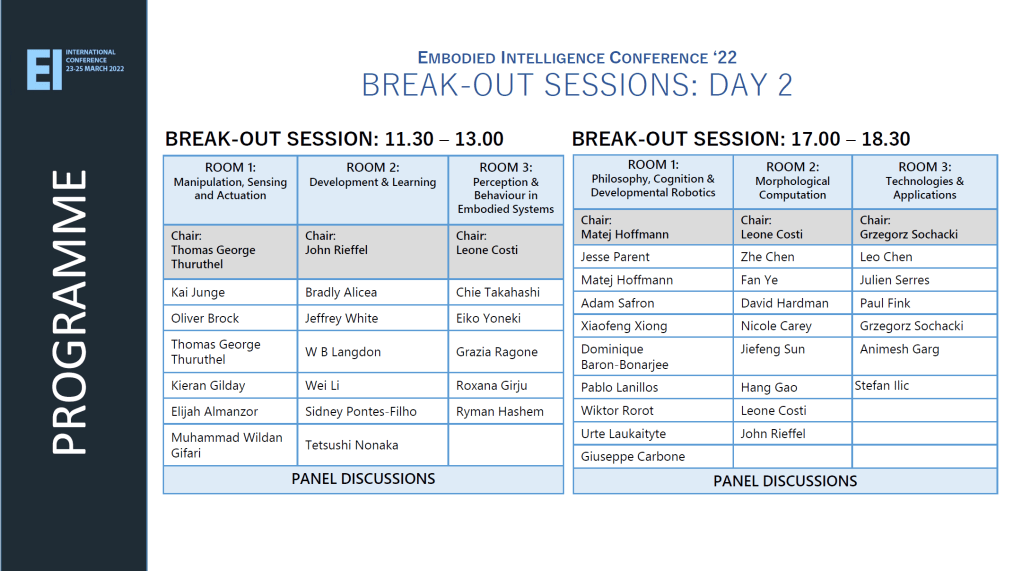
The programme for the breakout room talk titles can be found on this google docs link here.
PLENARY TALKS: Speakers, Titles and Abstracts
| KENJI DOYA (Okinawa Institute of Science and Technology, Japan) TITLE: Embodied agents for survival, reproduction, and prediction ABSTRACT: Reinforcement learning agents can acquire a variety of behaviors through exploration in the environment and reward feedback. Can artificial agents acquire their own reward functions? The reward systems in animals are shaped through evolution to satisfy survival and reproduction. We developed an embodied evolution framework in which reward functions and hyper parameters of learning are evolved. We further discuss how novel information can be an additional reward to allow agents to better predict the environment. | |
| KATHERINE KUCHENBECKER (Max Plank Institute for Intelligent Systems, Germany) TITLE: Haptic Intelligence for Human-Robot Interaction ABSTRACT: The sense of touch plays a crucial role in the sensorimotor systems of humans and animals. In contrast, today’s robotic systems rarely have any tactile sensing capabilities because artificial skin tends to be complex, bulky, rigid, delicate, unreliable, and/or expensive. To safely complete useful tasks in everyday human environments, robots should be able to feel contacts that occur across all of their body surfaces, not just at their fingertips. Furthermore, tactile sensors need to be soft to cushion contact and transmit loads, and their spatial and temporal resolutions should match the requirements of the task. We are thus working to create tactile sensors that provide useful contact information across different robot body parts. However, good tactile sensing is not enough: robots also need good social skills to work effectively with and around humans. I will elucidate these ideas by showcasing several systems we have created and evaluated in recent years, including Insight and HuggieBot. | |
| DANIEL WOLPERT(Columbia University, USA) TITLE: Contextual inference underlies the learning of sensorimotor repertoires ABSTRACT: Humans spend a lifetime learning, storing and refining a repertoire of motor memories. However, it is unknown what principle underlies the way our continuous stream of sensorimotor experience is segmented into separate memories and how we adapt and use this growing repertoire. Here we develop a principled theory of motor learning based on the key insight that memory creation, updating, and expression are all controlled by a single computation – contextual inference. Unlike dominant theories of single-context learning, our repertoire-learning model accounts for key features of motor learning that had no unified explanation and predicts novel phenomena, which we confirm experimentally. These results suggest that contextual inference is the key principle underlying how a diverse set of experiences is reflected in motor behavior. | |
| KOHEI NAKAJIMA (University of Tokyo, Japan) TITLE: Physical reservoir computing and its relevance to embodied intelligence ABSTRACT: Input-driven dynamical systems can be viewed as information processing devices, and reservoir computing (RC) is one of the recent approaches that can explore this perspective in practice. Because of its generic nature, RC is not limited to digital simulations of neural networks, and any high-dimensional dynamical system can serve as a reservoir if it has the appropriate properties. The approach using a physical entity rather than abstract computational units as a reservoir is called physical reservoir computing (PRC). In this presentation, through a number of examples, we will explore how the RC/PRC framework can provide a novel view of embodied intelligence and soft robotics. | |
| JOANNA BRYSON (Hertie School of Governance, Germany) TITLE: The social communication of meaning to AI ABSTRACT: Is semantic meaning derived only from direct empirical experience of the world, or can it be transmitted between agents and co-constructed as a community? I will suggest neither of these is entirely true. Rather semantic meaning must be socially constructed. Language is by its nature a collaborative process of reifying the most useful concepts for a particular society for their collaborative opportunities. This talk can be seen as starting from our 2017 paper on the presence of human implicit biases in AI, which also demonstrates those bias’s origins in our lived experience. From this I consider the impacts of embodied experience on human and artificial intelligence. I also discuss briefly implications for ethics. | |
| ALLISON OKAMURA (Stanford University, USA) TITLE: Understanding and Designing for Human Haptic Intelligence ABSTRACT: Haptic devices allow touch-based information transfer between humans and intelligent systems, enabling communication in a salient but private manner that frees other sensory channels. For such devices to become ubiquitous, their physical and computational aspects must be intuitive and unobtrusive. The amount of information that can be transmitted through touch is limited in large part by the location, distribution, and sensitivity of human mechanoreceptors. Not surprisingly, many haptic devices are designed to be held or worn at the highly sensitive fingertips, yet stimulation using a device attached to the fingertips precludes natural use of the hands. Thus, we explore the design of a wide array of haptic feedback mechanisms, ranging from devices that can be actively touched by the fingertips to multi-modal haptic actuation mounted on the arm. We demonstrate how these devices are effective in virtual reality, human-machine communication, and human-human communication. | |
| RYOTA KANA (Araya Inc, Japan) TITLE: Towards a Conscious Machine ABSTRACT: In this presentation, we introduce artificial consciousness as a constructivist approach that unpacks existing theories of consciousness and examines the potential for AI implementation of the concepts expressed in these theories. This approach forces researchers to translate philosophical ideas into mathematical and computational terms, thereby revealing the potential functions of consciousness. From this approach, we propose the hypothesis that consciousness has evolved as a platform for general-purpose intelligence. General intelligence can be defined as the ability to generate solutions to new problems by applying knowledge and models learned from past experiences. In this talk, we will specifically examine the ability to build new capabilities by combining pre-trained specialized modules. This approach to building general-purpose intelligence corresponds to the ideas presented by the global workspace theory. This theory assumes that the function of consciousness is to integrate information and combine specialist modules across large systems to achieve higher levels of cognition and awareness. We will present our current implementation of a global workspace with deep learning and explain the practical implications of the architecture proposed by this theory. |
SHORT TALKS: Speakers and Titles
| AMANDA PROROK TITLE: Learning to communicate in multi-agent systems | |
| ANTONIO BUCCHI TITLE: What is it like to be a bot? | |
| AUKE IJSPEERT TITLE: Exploring the interaction of feedforward and feedback control in the spinal cord using biorobots | |
| COSIMO DELLA SANTINA TITLE: Discovering, embedding, and exciting oscillatory intelligence in (soft) robots | |
| CYNTHIA SUNG TITLE: Designing Compliance for Dynamical Tasks | |
| DANA DAMIAN TITLE: Resilient soft robots – a view from inside the human body | |
| DARWIN LAU TITLE: Robotics for Smart Construction and Living | |
| ETIENNE BURDET TITLE: Body adaptation to improve haptic sensitivity | |
| JOSH BONGARD TITLE: Computer-designed organisms | |
| KANAKO HARADA TITLE: Interdisciplinary research for medical robots | |
| KENJI SUZUKI TITLE: Human Robotics and Embodied Intelligence | |
| KENJIRO TADAKUMA TITLE: Beyond Soft Robotic Mechanisms – From a Deployable Soft Mechanism Inspired by a Nemertea Proboscis to a Robotic Blood Vessel Mechanism | |
| KIRSTIN PETERSEN TITLE: Embodied Intelligence in Multi-Robot Systems | |
| KOH HOSODA TITLE: Biomimetic Robotic Feet | |
| MAKI SATO TITLE: Between Authenticity and Artificial — shedding light on a contingency | |
| MIKE TOLLEY TITLE: Embodied intelligence for bioinspired soft robots | |
| PETER XU TITLE: Digestion Robotics | |
| ROB WOOD TITLE: The Mechanical Side of Artificial Intelligence | |
| SEPPE TERRYN TITLE: Self-healing soft robots | |
| RODOLPHE SEPULCHRE TITLE: Spiking Control Systems | |
| TAMAR MAKIN TITLE: Soft embodiment for engineering artificial limbs | |
| TETSUYA OGATA TITLE: Deep Predictive Learning for Embodied Intelligence | |
| THOMAS SPECK TITLE: Embodied intelligence in plants: Does it exist? |
