20 MARCH 2024
PLEASE NOTE THAT OWING TO COPYRIGHT OR INTELLECTUAL PROPERTY PERMISSIONS WE ARE UNABLE TO SHARE RECORDINGS OF SOME SESSIONS
VIDEO: INTRODUCTION AND WELCOME: Fumiya Iida (University of Cambridge, UK)
VIDEO: DAY 1 AFTERNOON SESSION 1 chaired by Josie Hughes (EPFL, Switzerland)
PLENARY TALKS
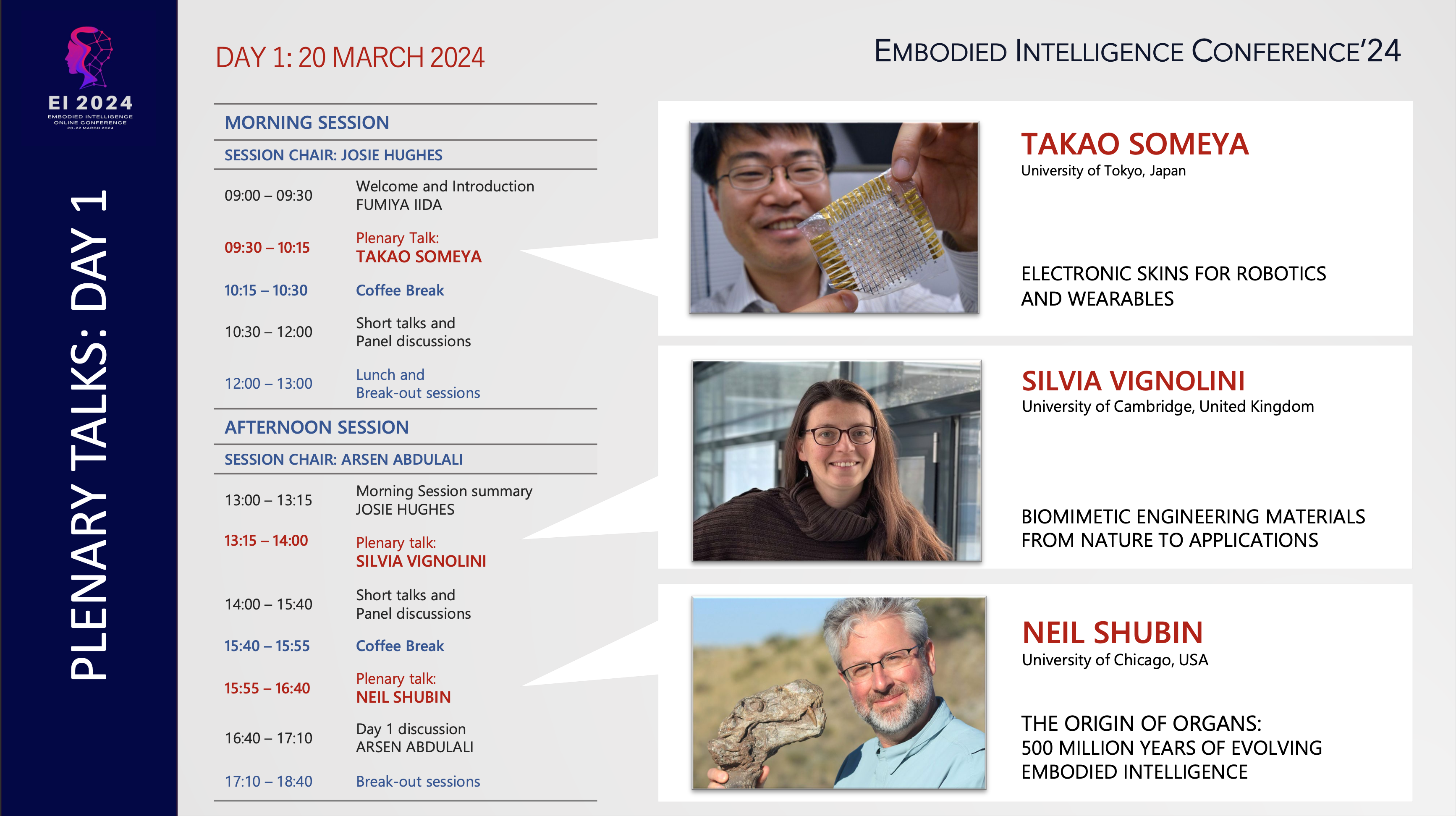
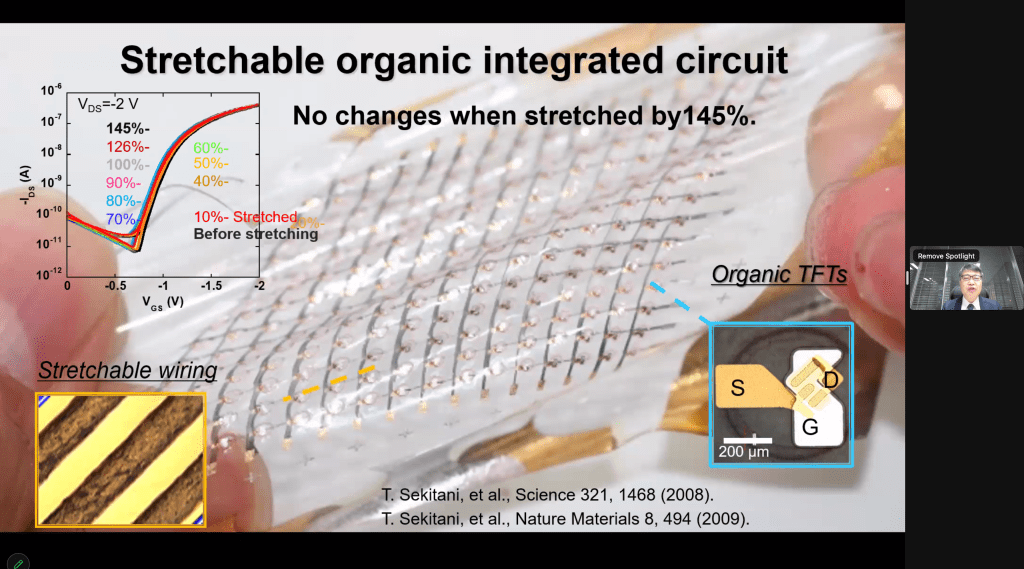
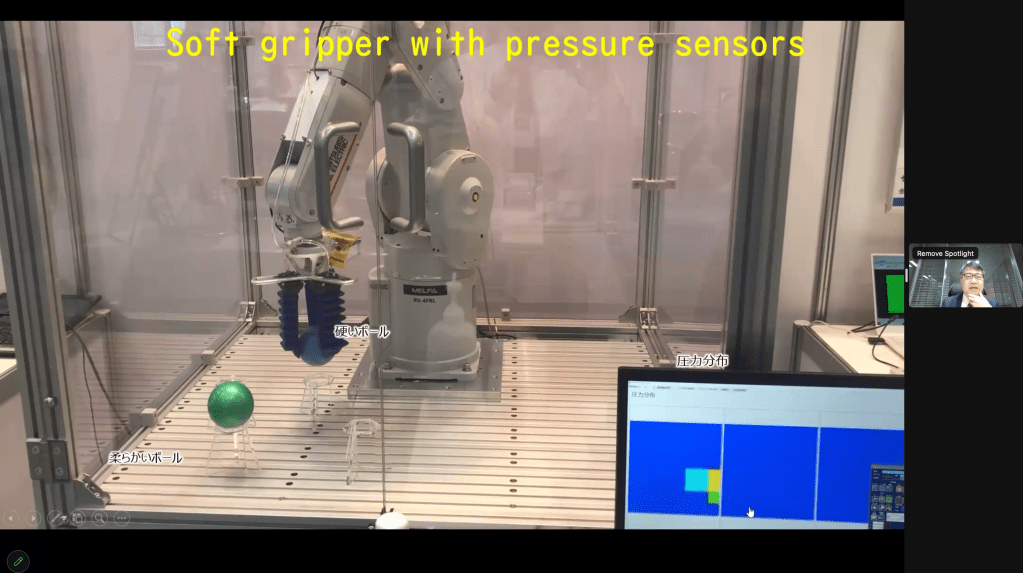
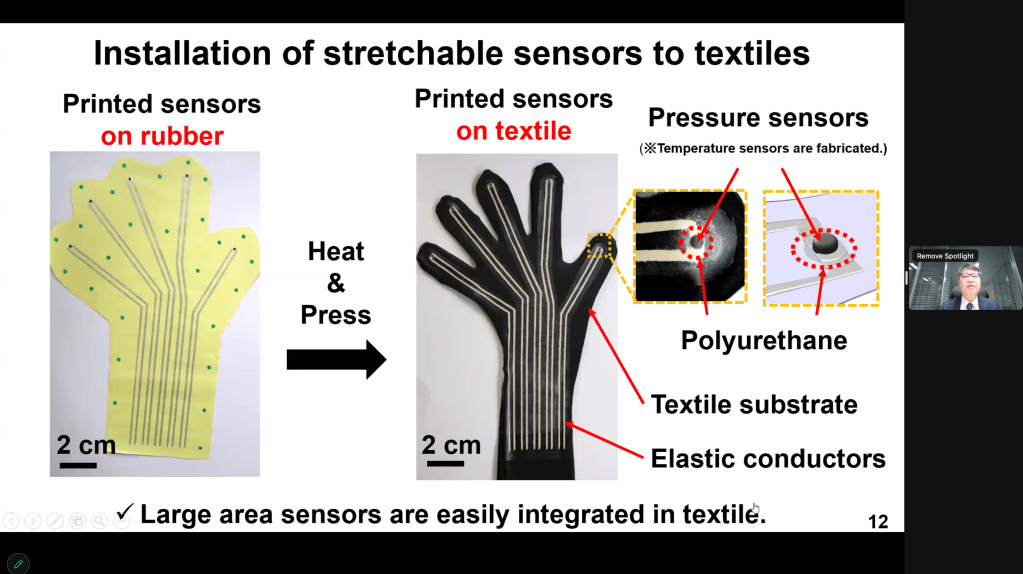
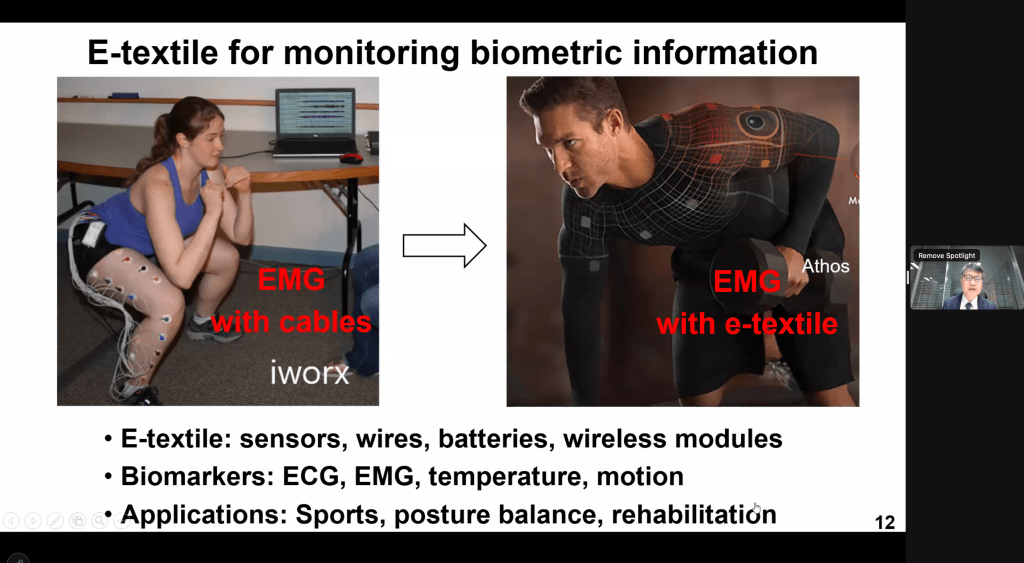
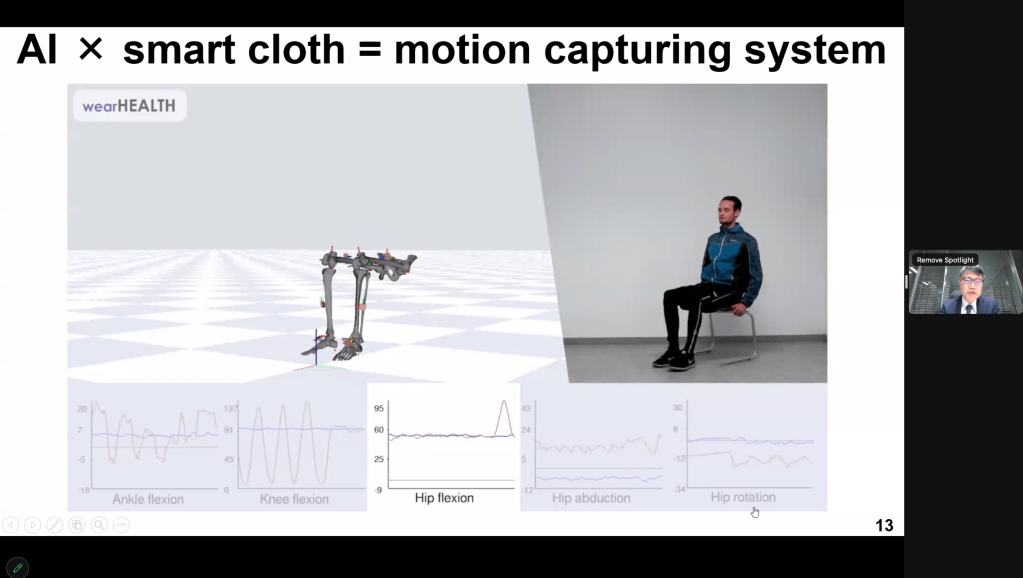
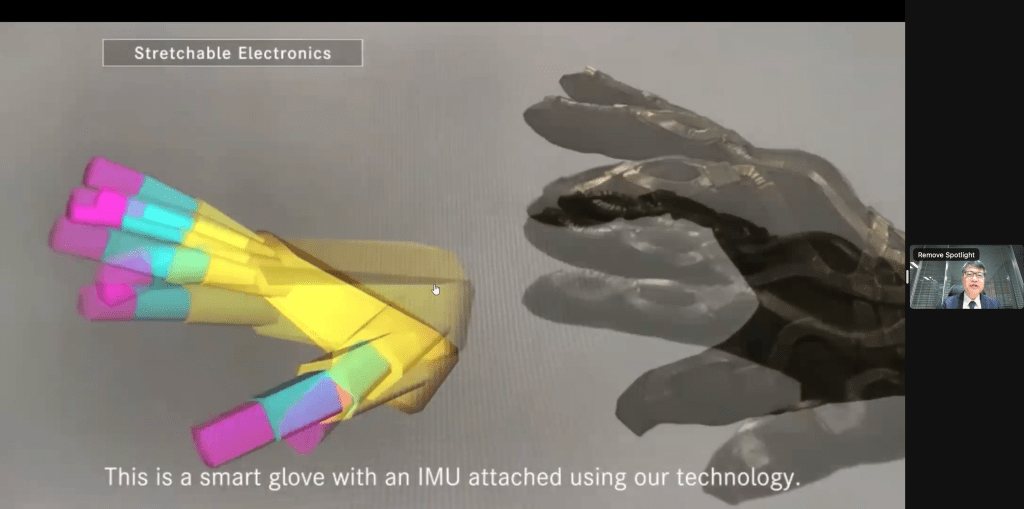
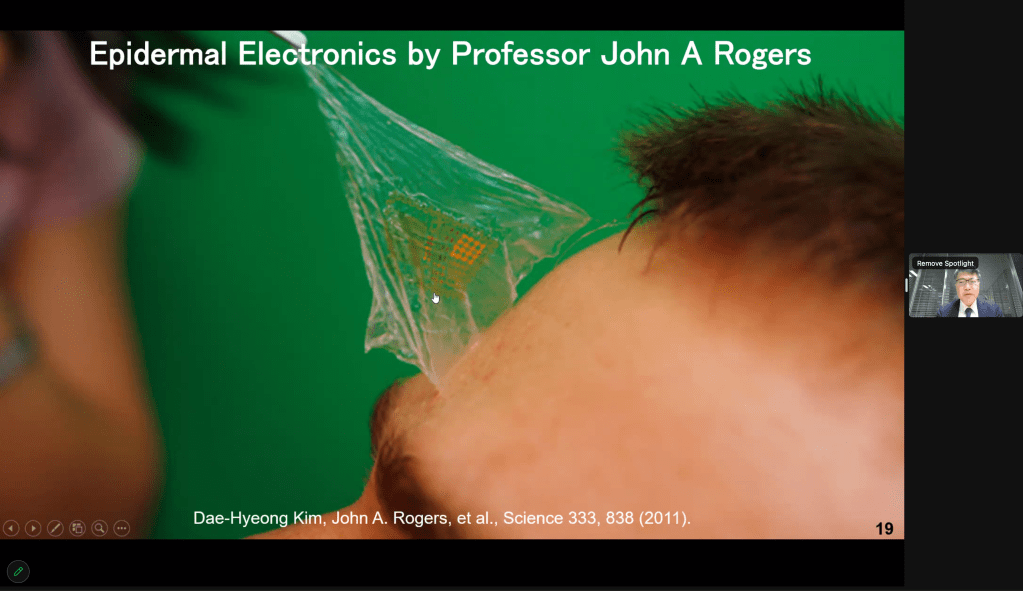
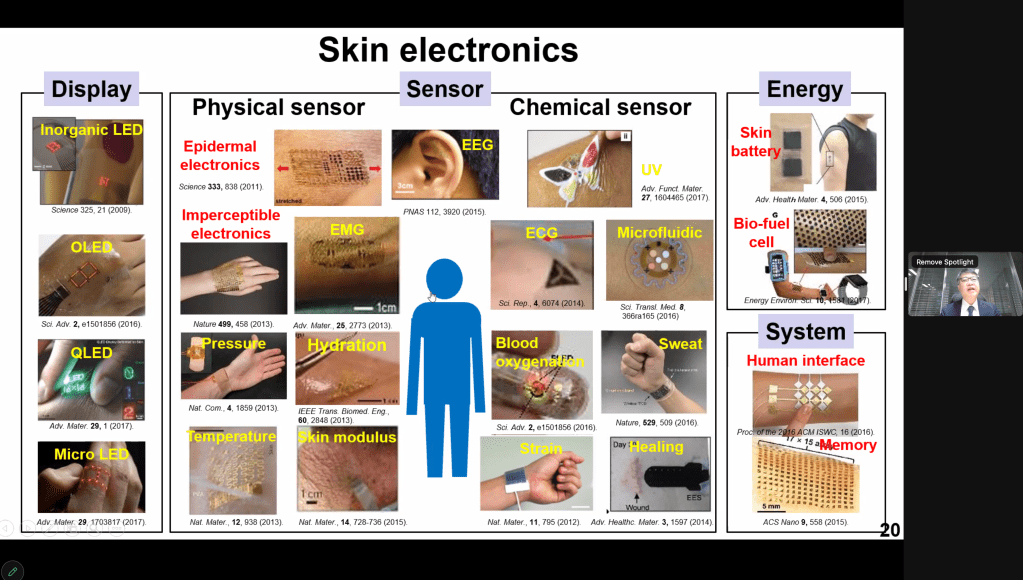
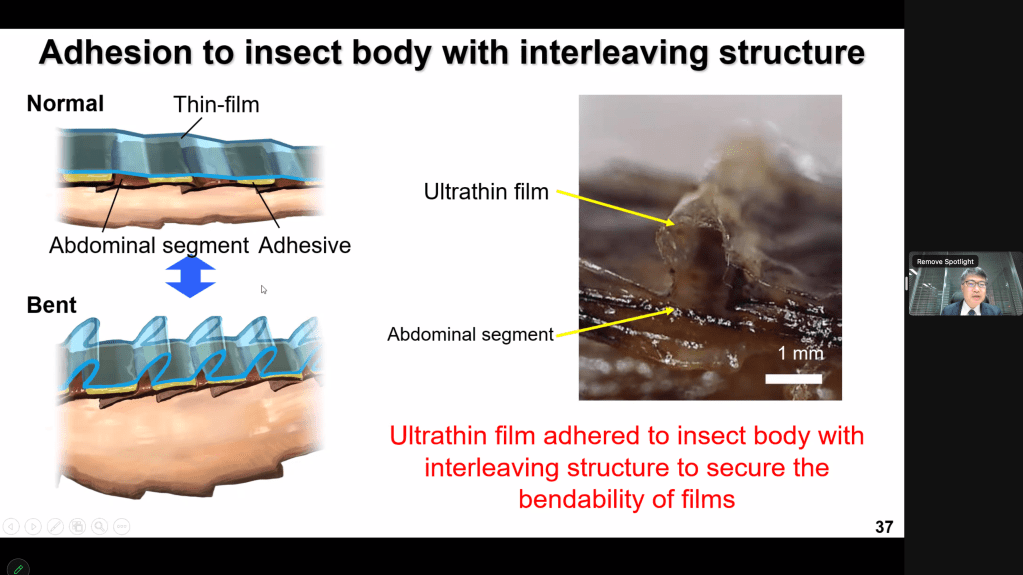
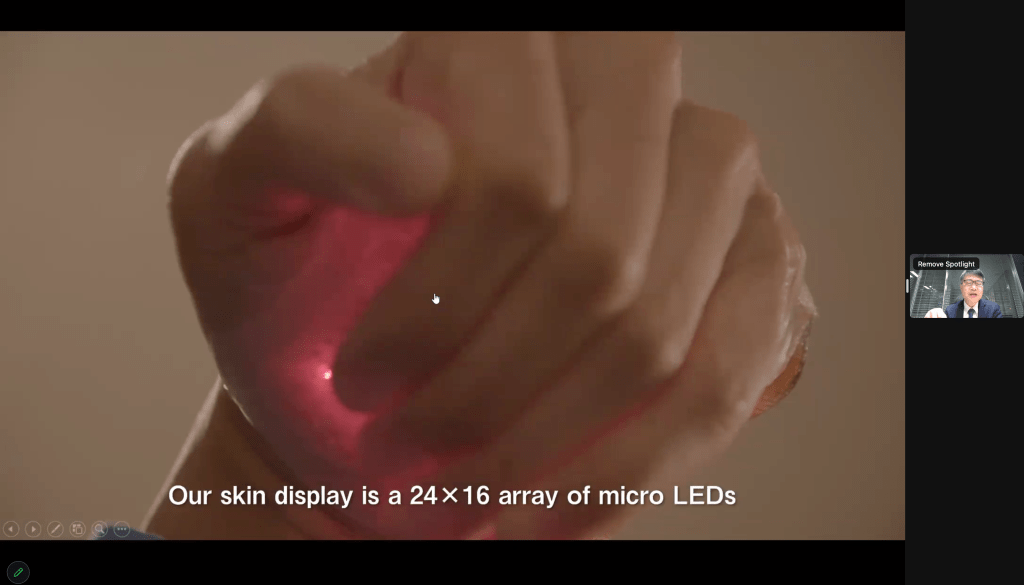
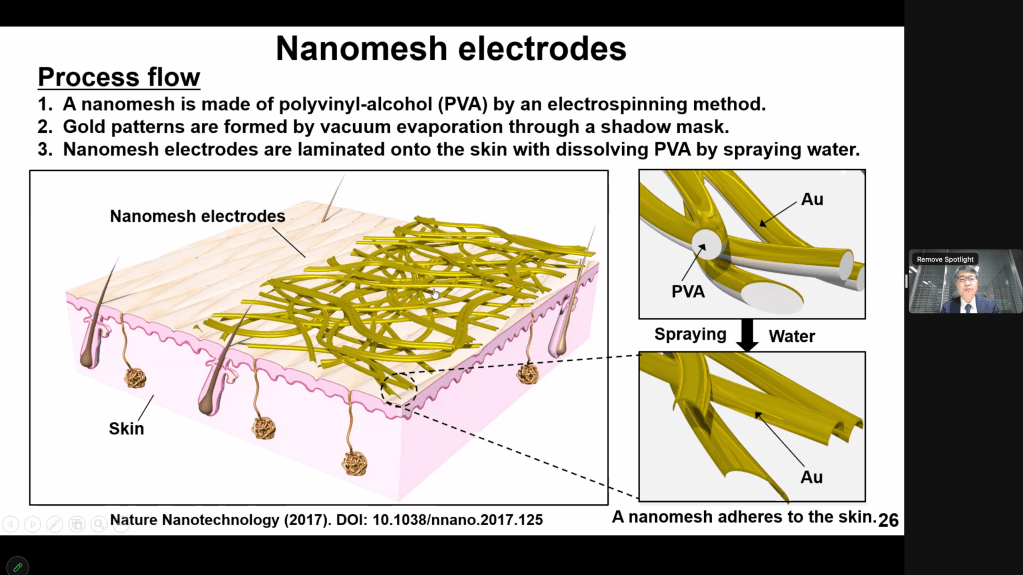
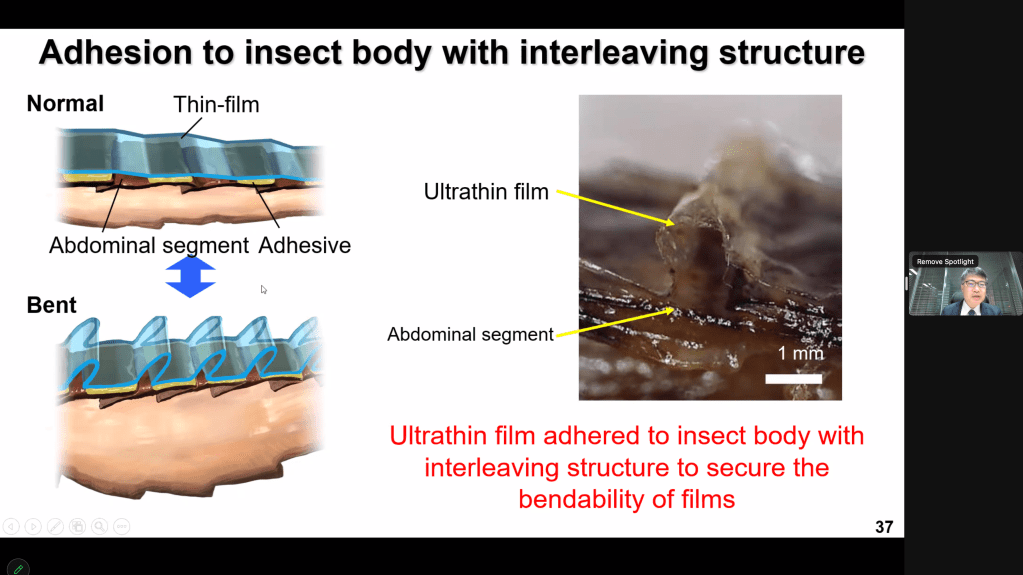
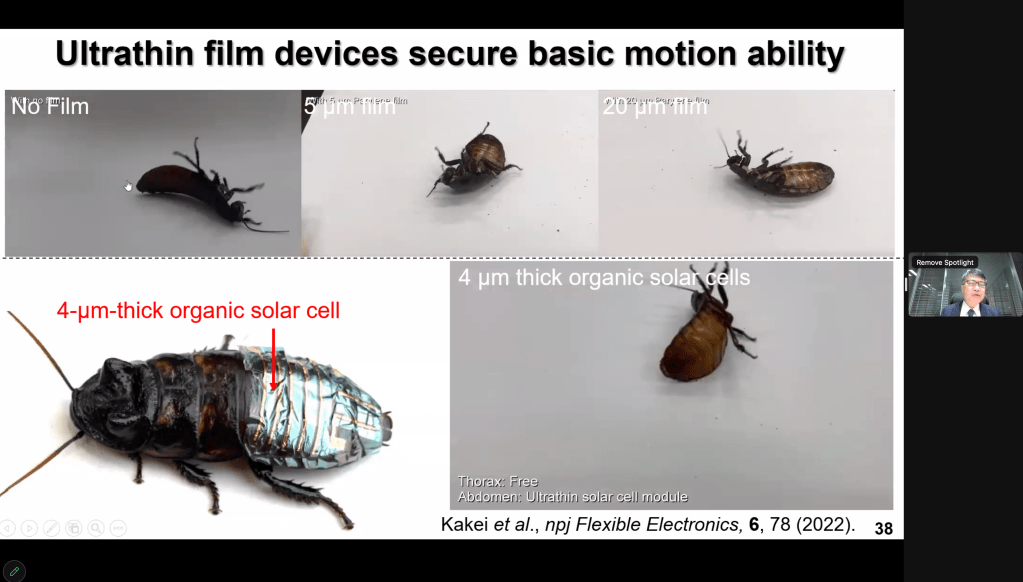
TAKAO SOMEYA (University of Tokyo, Japan)
VIDEO: ELECTRONIC SKINS FOR ROBOTICS AND WEARABLES
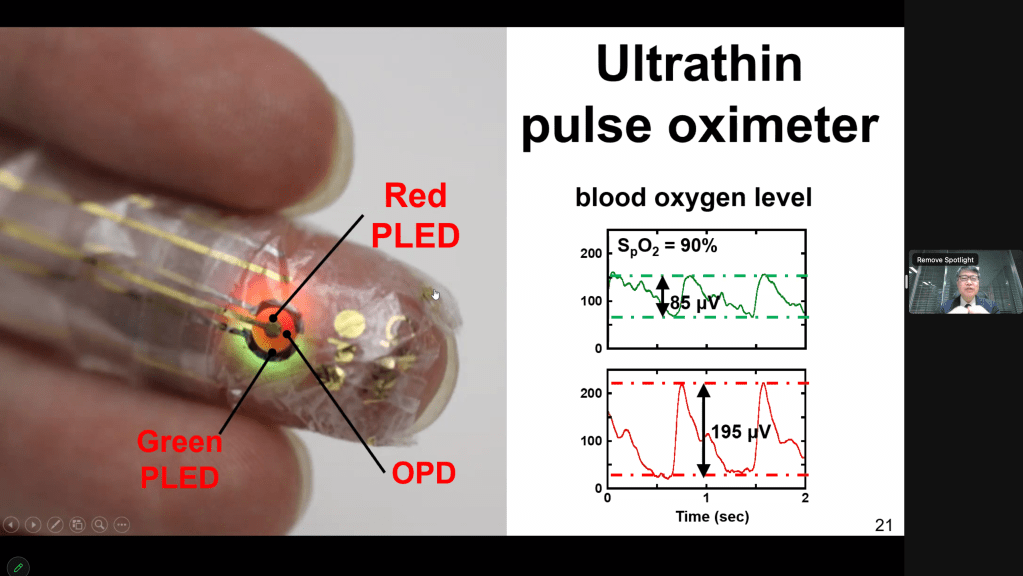
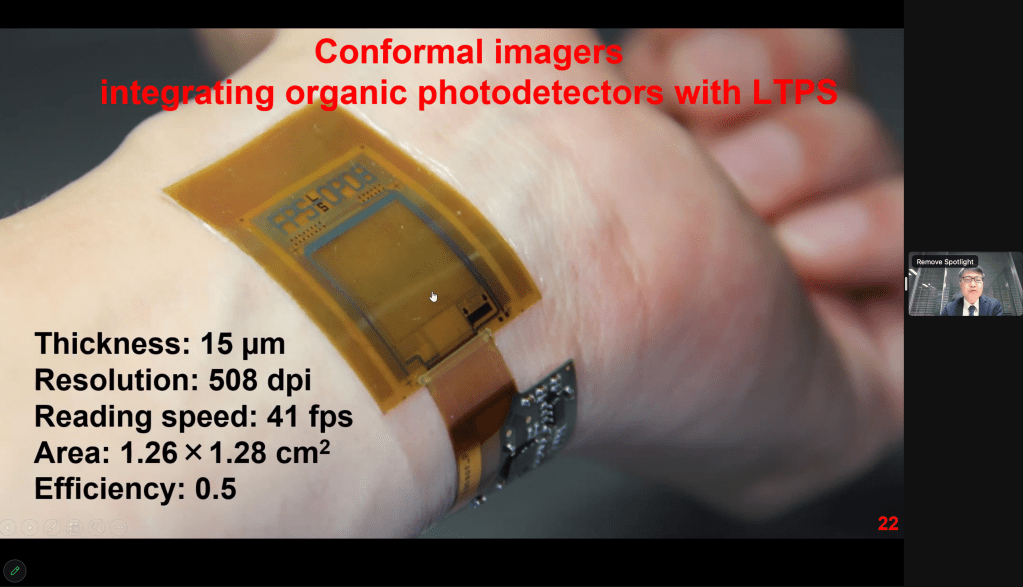
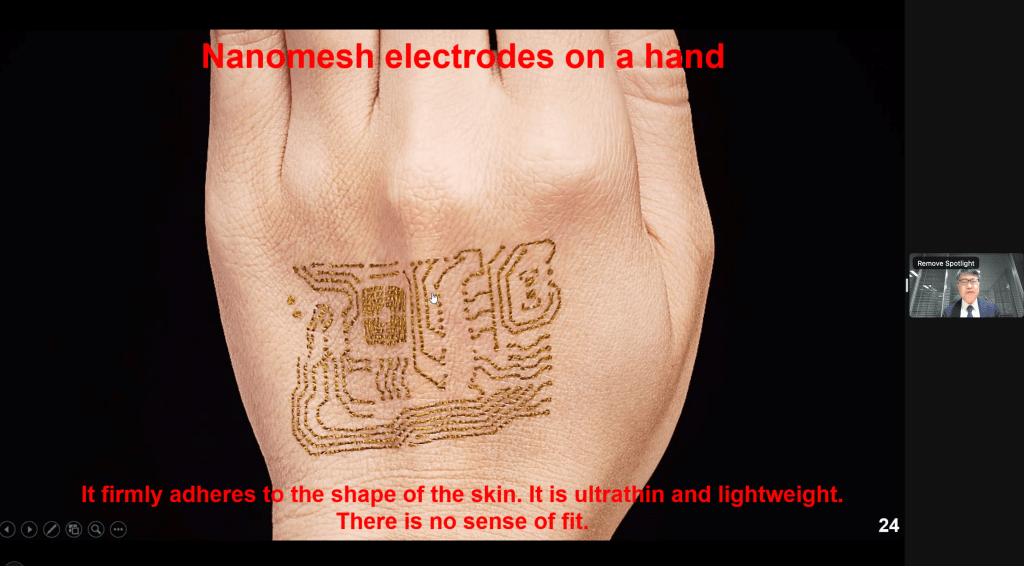
Abstract: Flexible electronics continues to expand its application from robotics to human, with increased attention for its contribution to personalized healthcare. Attempts to replicate the function of human skin have resulted in the development of electronic skins for robots that simultaneously detect pressure and thermal distribution. Improvement in conformability allowed the application of electronic skin to human bodies, reaching a point where ultrathin semiconductor membrane can be directly laminated onto the skin. The intimate and conformal integration of electronics with the human skin not only facilitates continuous health monitoring but also holds immense potential for advancing wearable technologies. Seamless integration of electronics with the human skin enables non-invasive measurement of health conditions and human activities in natural settings. In my presentation, I will examine recent advancements in stretchable thin-film electronics, exploring how they contribute to the development of electronic skins and their capacity to enhance wearables. By addressing key challenges and highlighting prospects, I hope to shed light on how electronic skins can revolutionize wearables, offering interactive reinforcement between technology and the human body for improved healthcare monitoring.
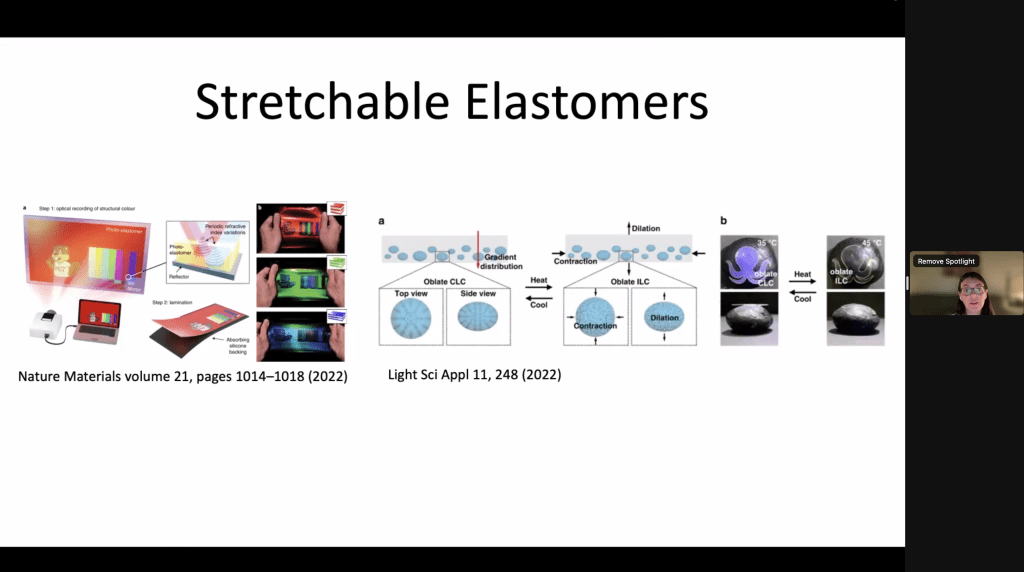
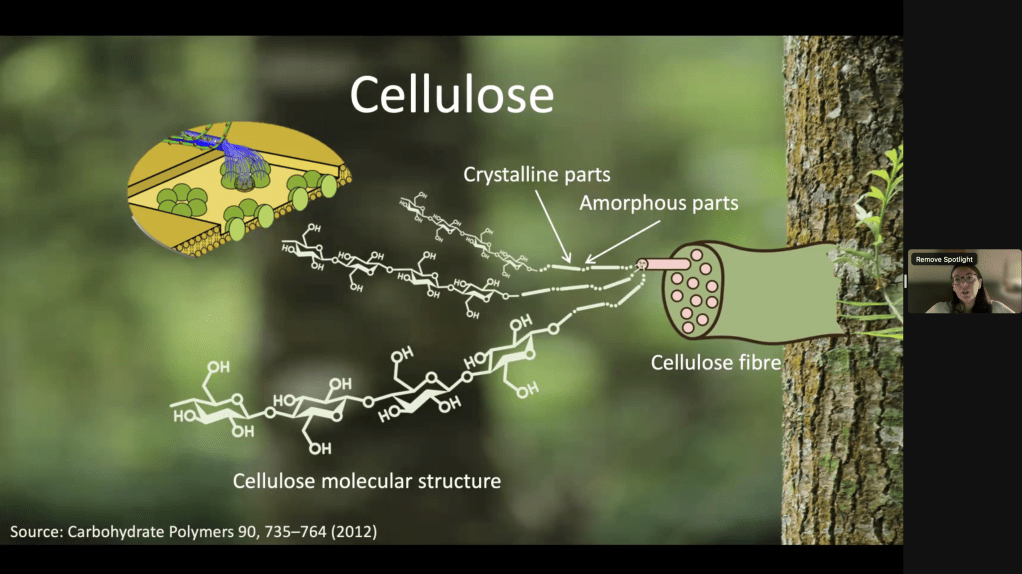
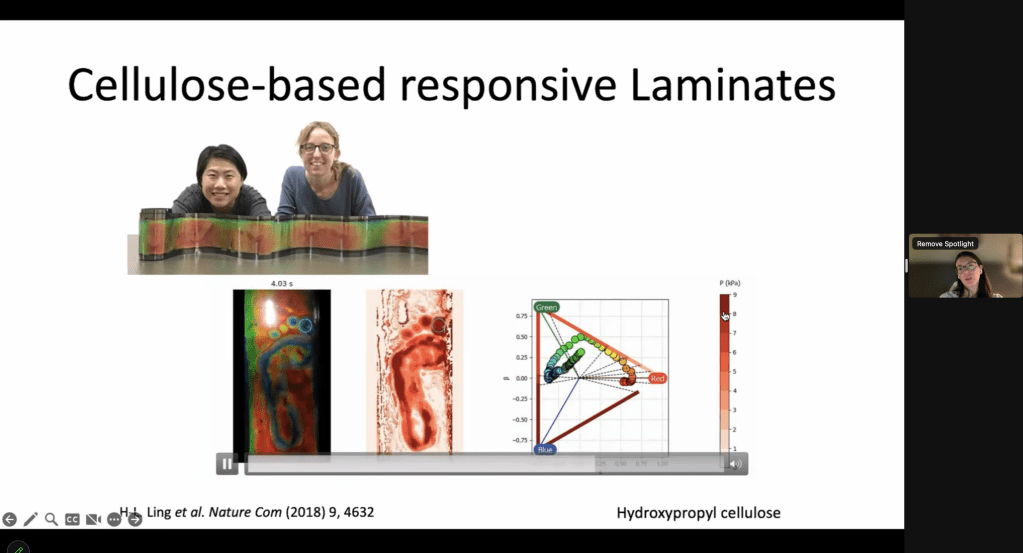
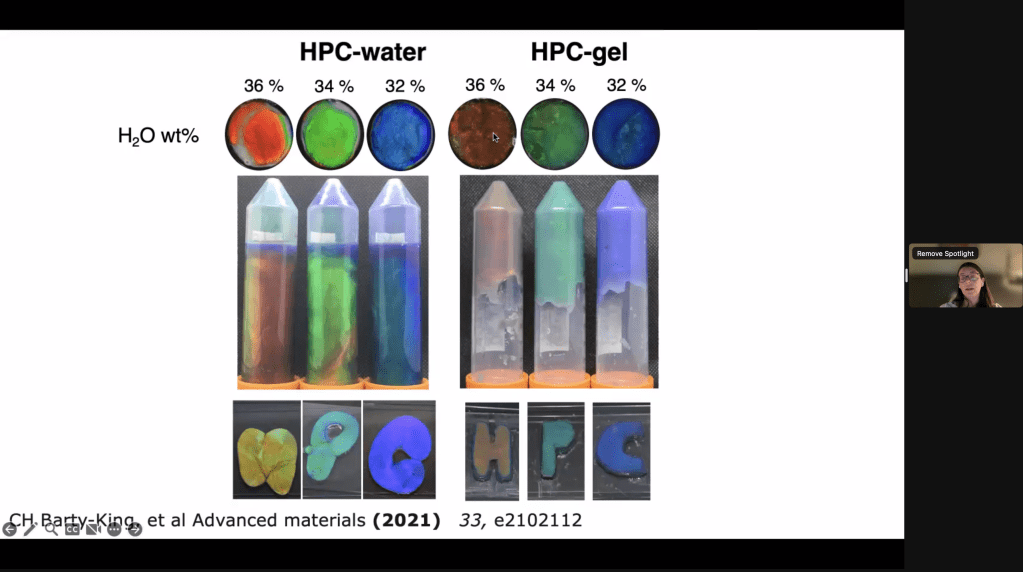
SILVIA VIGNOLINI (University of Cambridge, UK)
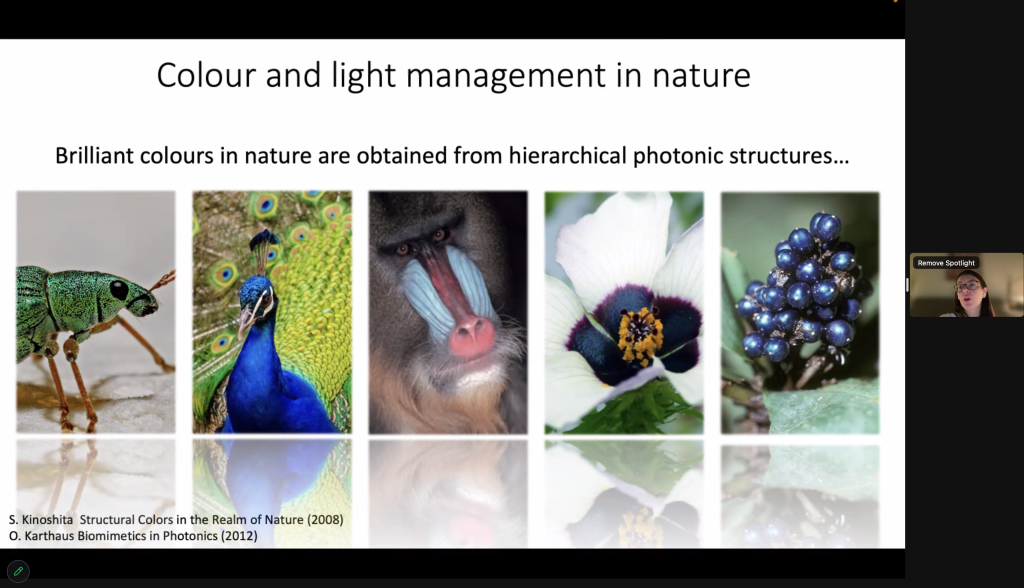
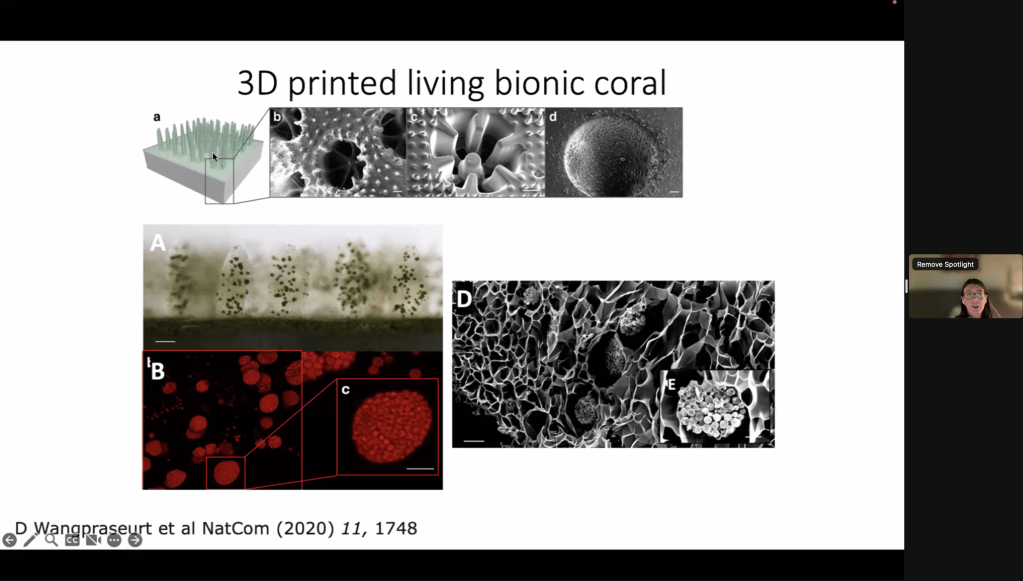
VIDEO: BIOMIMETIC ENGINEERING MATERIALS FROM NATURE TO APPLICATIONS
Abstract: Biomimetics, inspired by nature’s design principles, has emerged as a burgeoning field bridging biology, engineering and material science. Thi talk explores the journey of biomimetic materials esepcially optical ones, tracing their inception from natural structures to their diverse applications. By mimicking biological systems, we try to harness the efficiency, adaptability, and sustainability inherent in nature’s designs.
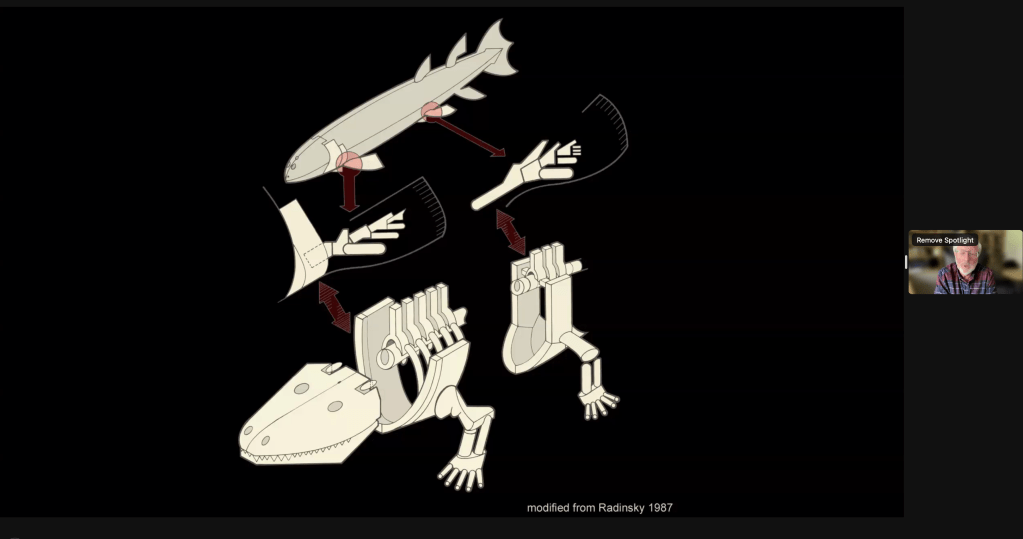
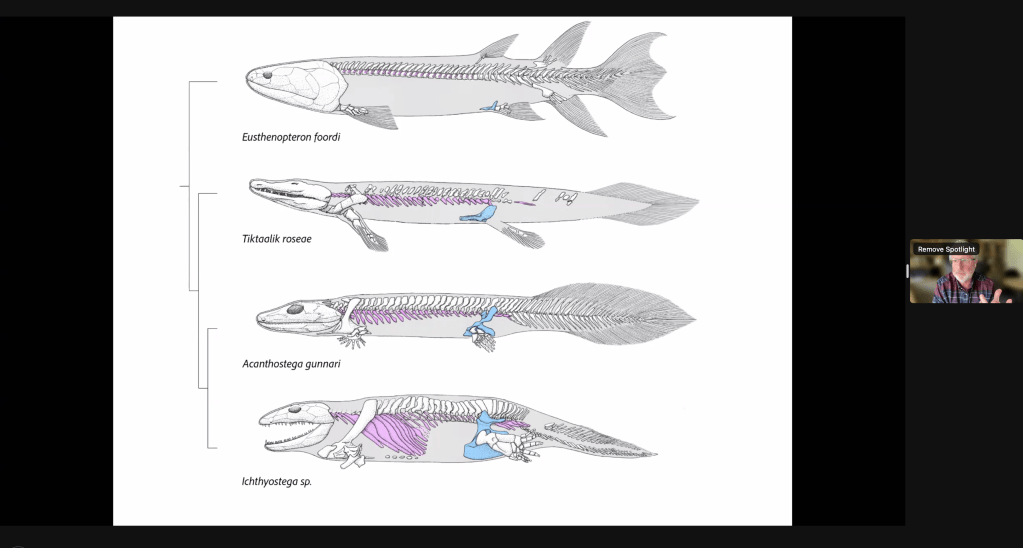
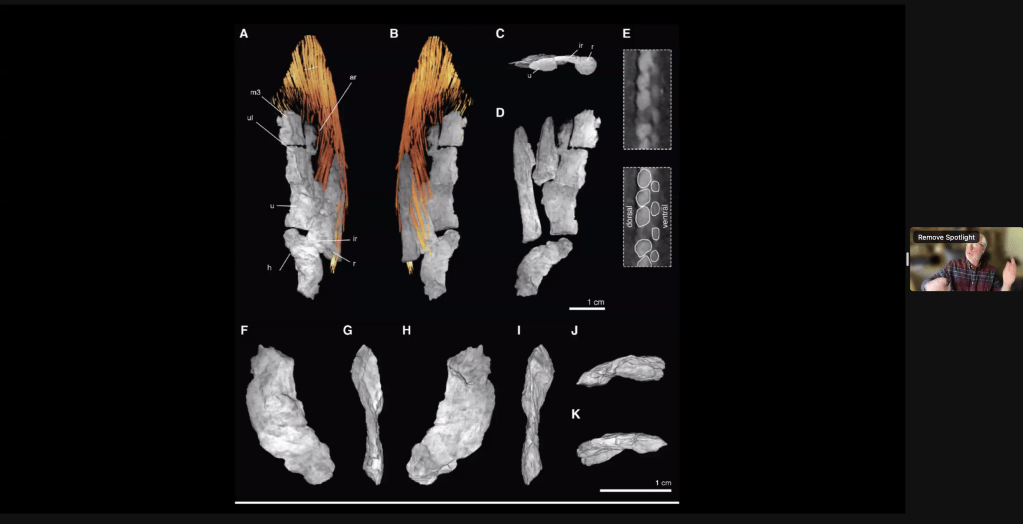
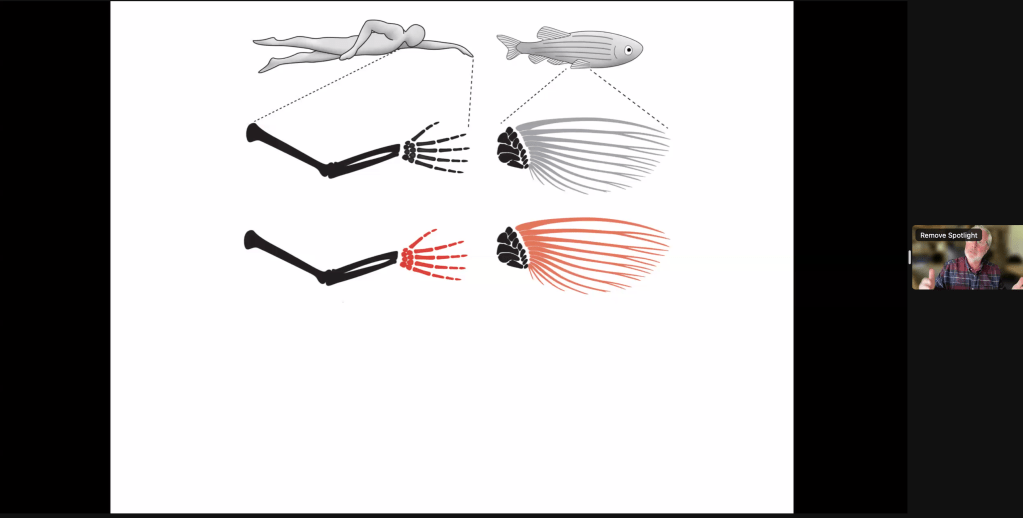
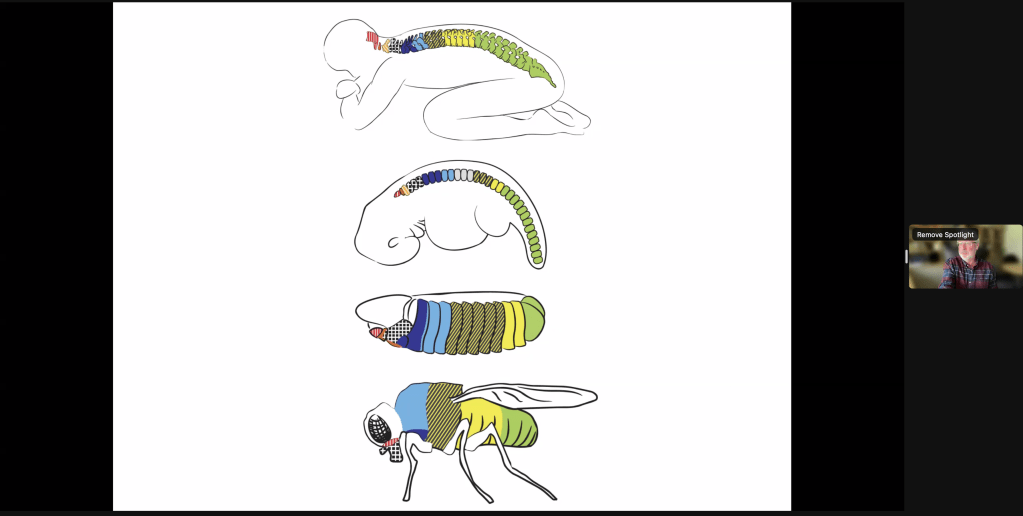
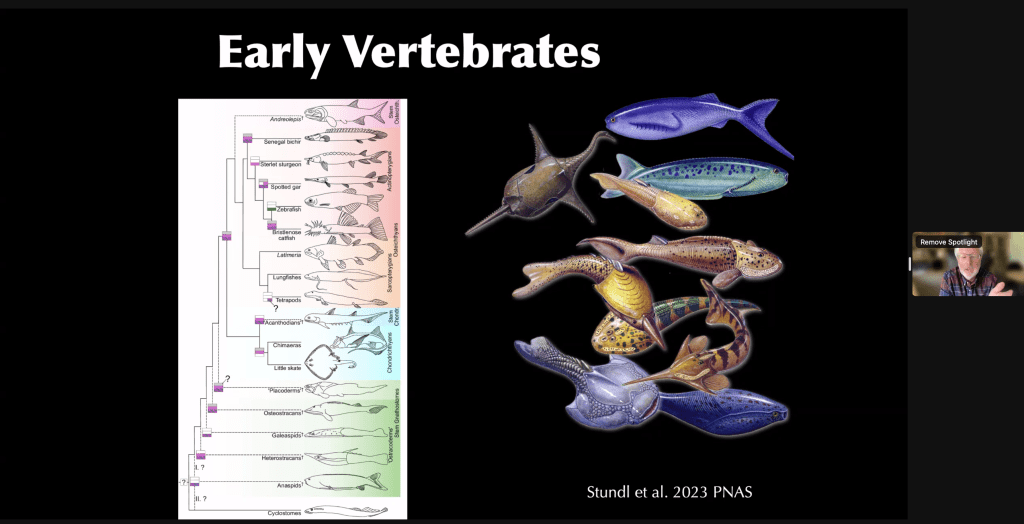
NEIL SHUBIN (University of Chicago, USA)
VIDEO: THE ORIGIN OF ORGANS: 500 MILLION YEARS OF EVOLVING EMBODIED INTELLIGENCE
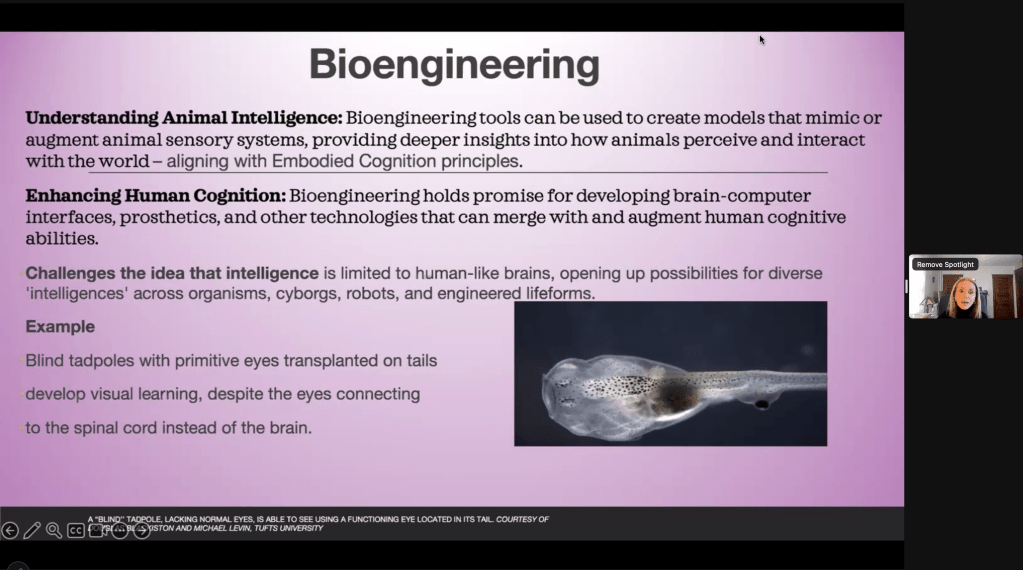
Abstract: This talk will review the mechanisms behind the origins of novel structures and body plans during the evolution of animals. The central theme is that very few features arise completely de novo: the antecedents of different organs, body parts, and functions often take winding path that is not obvious from the current function or appearance of a structure. Examples will include appendages, genes, and vertebrate teeth. The origin of these novelties reveals the importance of repurposing, cooption, duplication and divergence, redundancy, and self assembly during evolution.
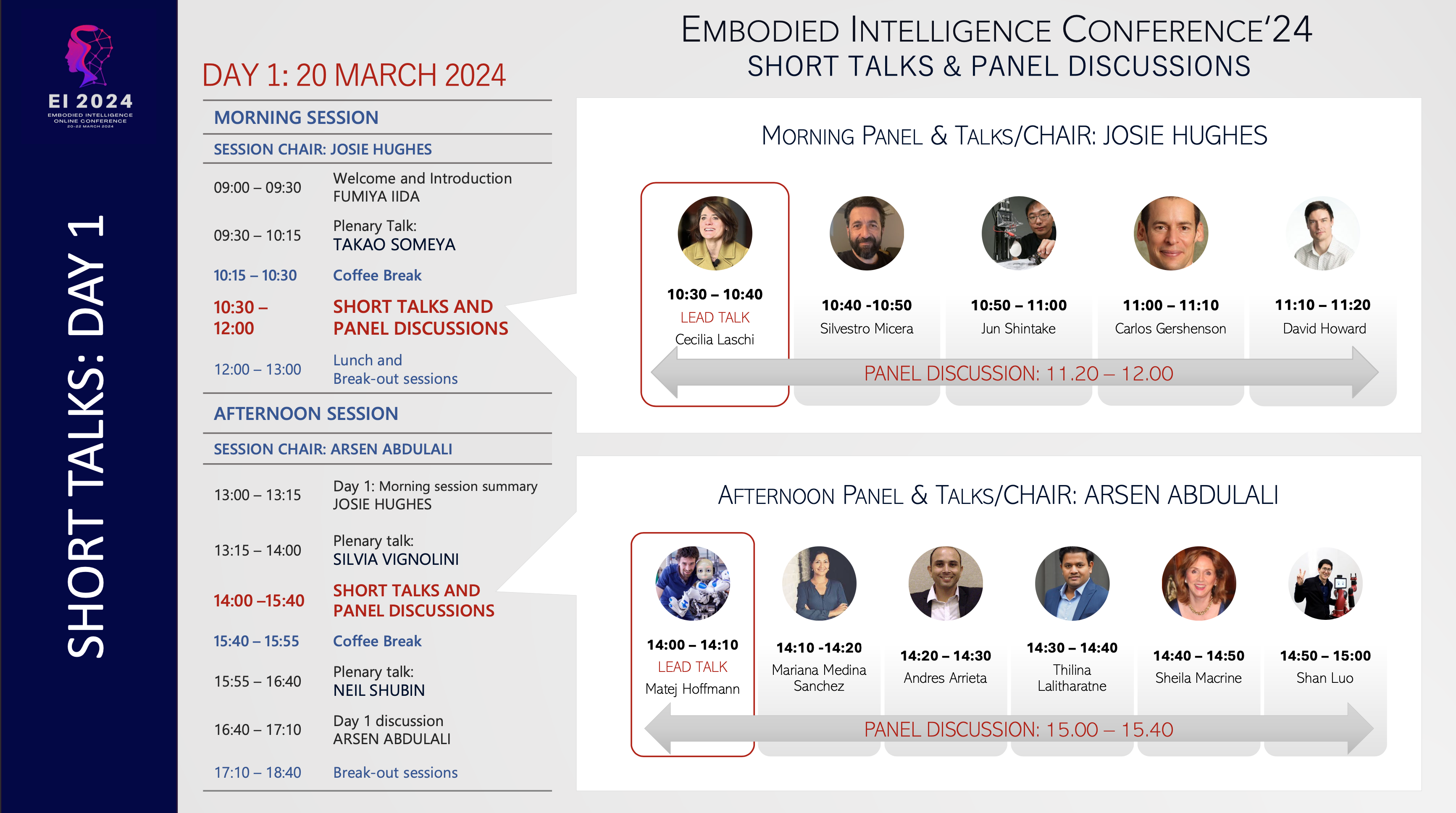
MORNING SHORT TALKS (VIDEOS)
- Cecilia Laschi: EMBODIED INTELLIGENCE AND SOFT ROBOTICS: TIME TO MEND THE BRAIN-BODY GAP?
- Abstract: Robots started becoming soft when we realized that embodied intelligence can simplify control, if we use the external interactions thanks to a compliant body. While robotics has focused on brain-related intelligence for years, embodied intelligence shifted the focus onto the body and mechanical forms of intelligence. Thanks to this approach, soft robotics progressed greatly in terms of materials, components, and abilities that robots can show. As the field matures, there is a growing recognition of the need to transition towards a model-informed discipline. This involves developing accurate models that capture the principles of embodied intelligence and the complex interactions between the robot and its environment. While the focus on the robot bodyware brought great progress in few years, the investigation of embodied intelligence should not be segregated to its mechanical form. Once learned how to put the mechanical side of intelligence into the equation, time has come to mend the brain-body gap and integrate brain-like cognitive forms of intelligence with embodied ones.
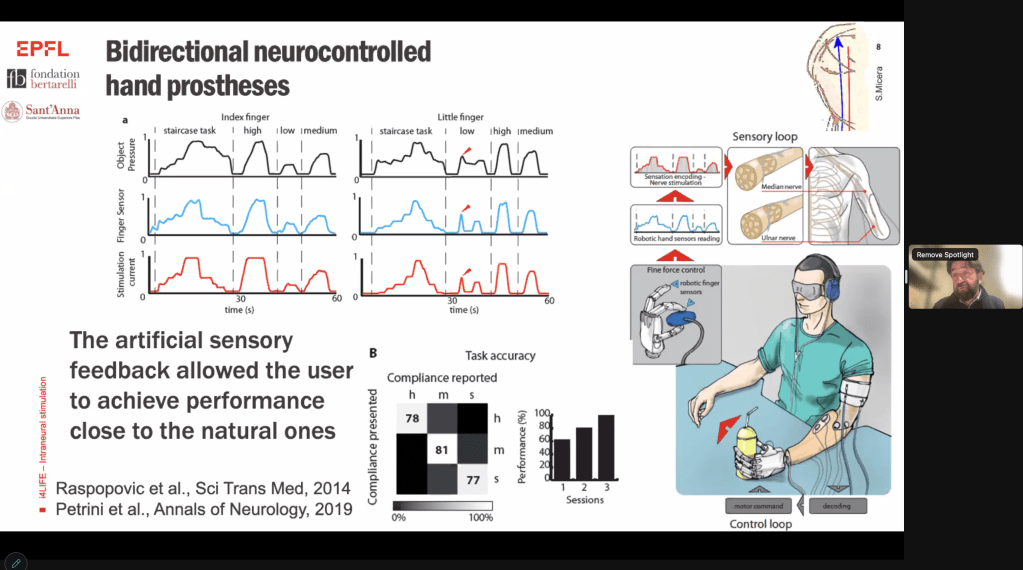
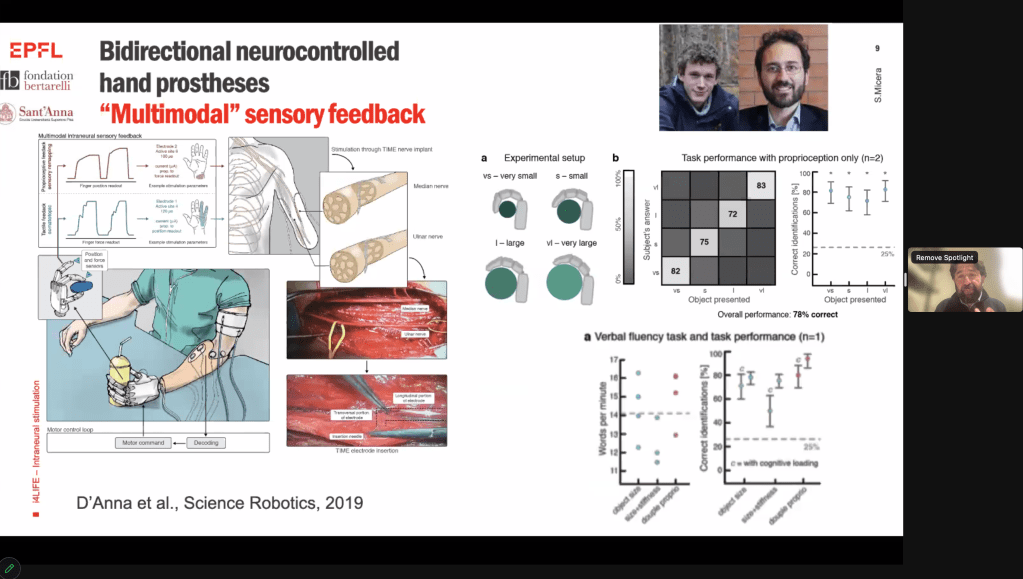
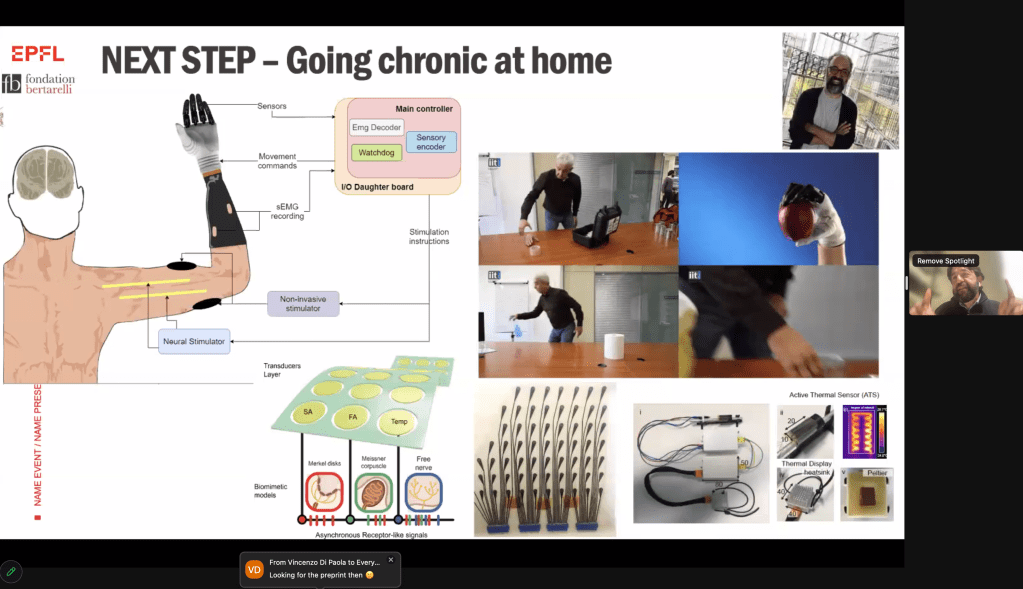
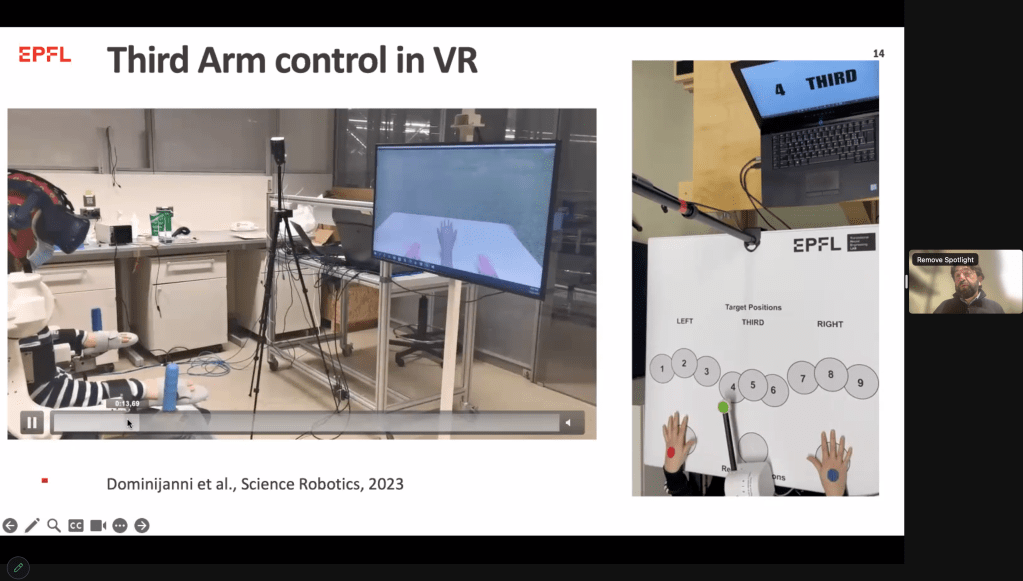
- Silvestro Micera: SOFT EMBODIMENT FOR ENGINEERING ARTIFICIAL LIMBS
- Abstract: The field of neuro-prosthetics has witnessed remarkable technological advancements, shifting from simple technological solutions to more adaptable and life-like replacements. This presentation explores the innovative concept of ‘Soft Embodiment’ in the engineering of artificial limbs, focusing on the implementation of different flexible approaches to create systems that restore the natural movement, responsiveness, and sensation of human limbs. Through a series of case studies, we demonstrate the application of soft embodiment in the design of artificial limbs. We also address the challenges and future prospects in the field. This presentation underscores the transformative potential of soft embodiment in the field of prosthetics, offering insights into how this approach can enhance the quality of life for amputees and pave the way for the next generation of bioinspired, adaptive prosthetic limbs.
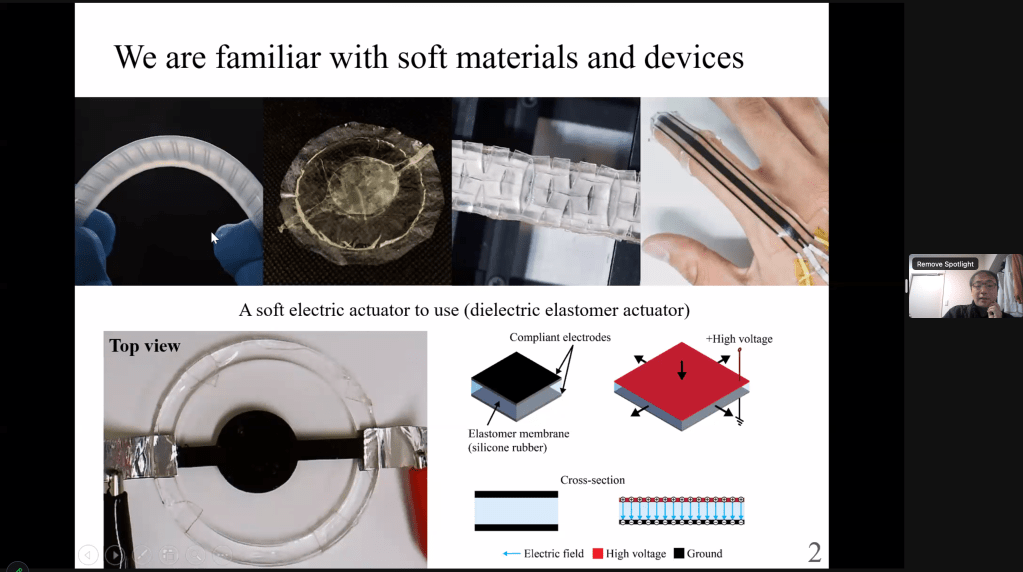
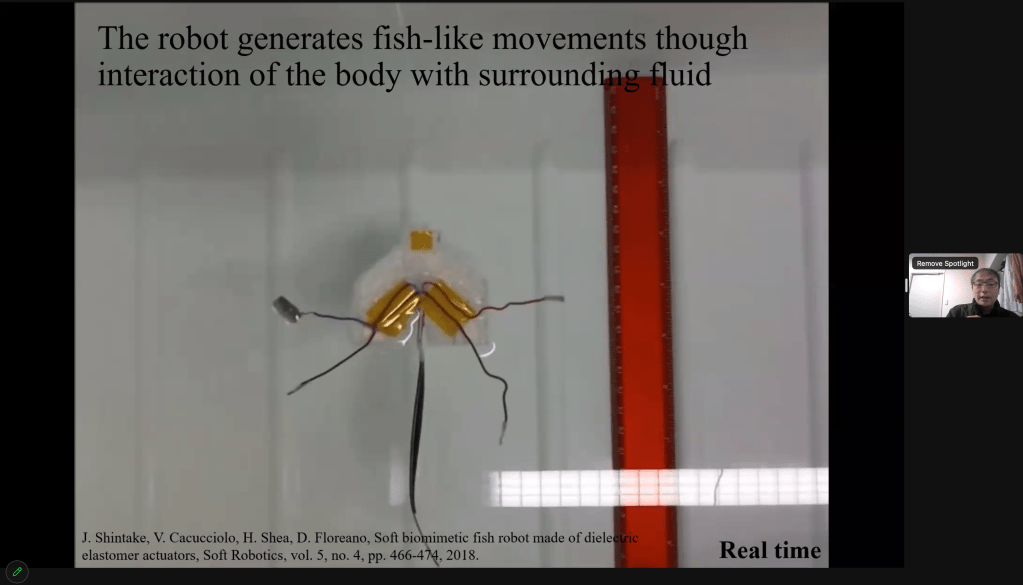
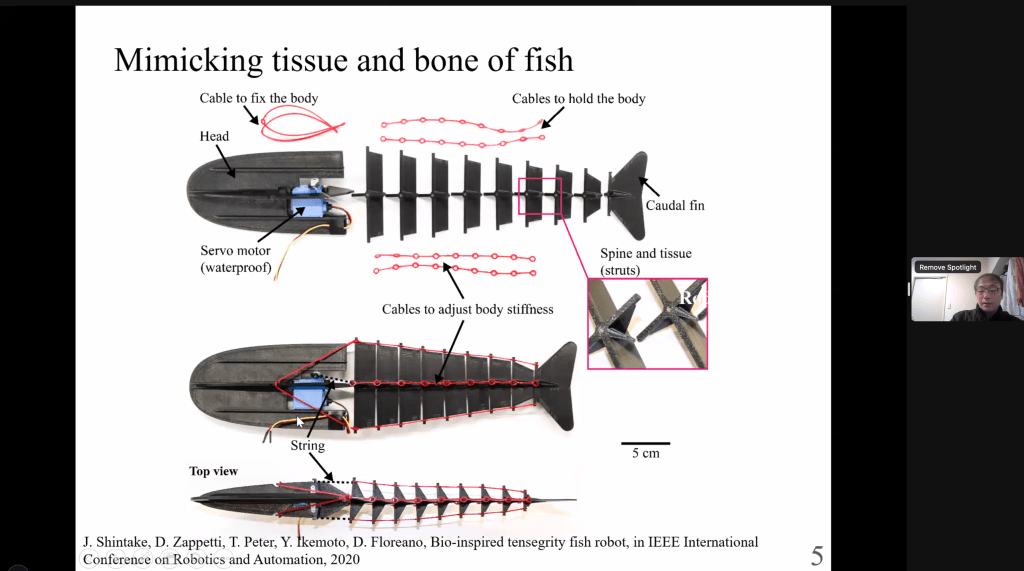
- Jun Shintake: SOFT UNDERWATER ROBOTS
- Abstract: Underwater robots made of compliant materials swim through deformations of their body as a result of interaction with the surrounding fluid. These deformations, often resembling to those of fish, can be interpreted as caused by embodied intelligence of the robot body. In this talk, I will showcase our work on soft underwater robots based on various working principles.
- Carlos Gershenson: ON THE LIMITS OF ARTIFICIAL INTELLIGENCE
- Abstract: Gödel, Turing, Chaitin, and others have shown limits of formal systems, which have been the basis of computers and artificial intelligence. I will review these limits, relate them to artificial intelligence, artificial life, and complexity, and speculate on ways to overcome them.
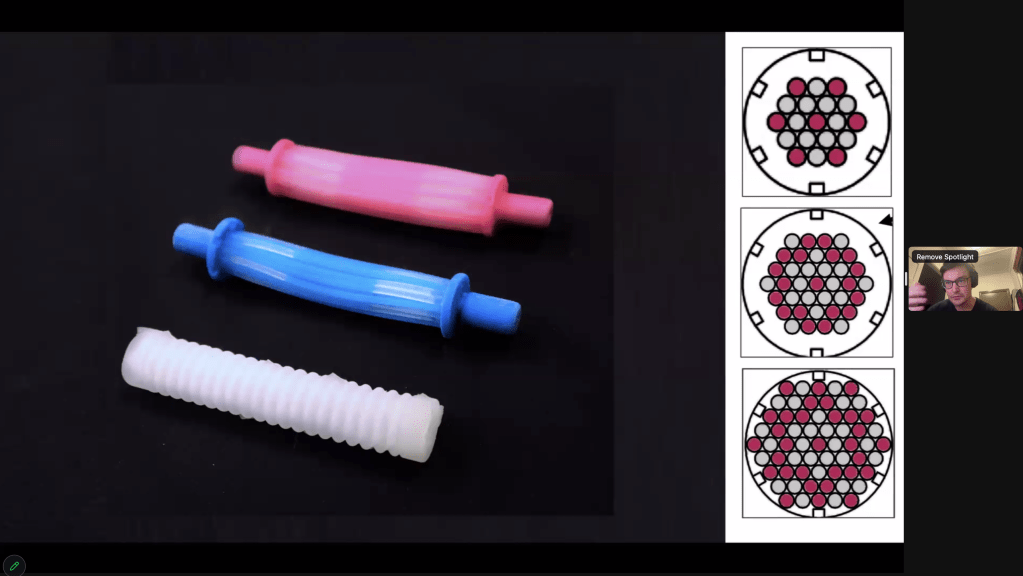
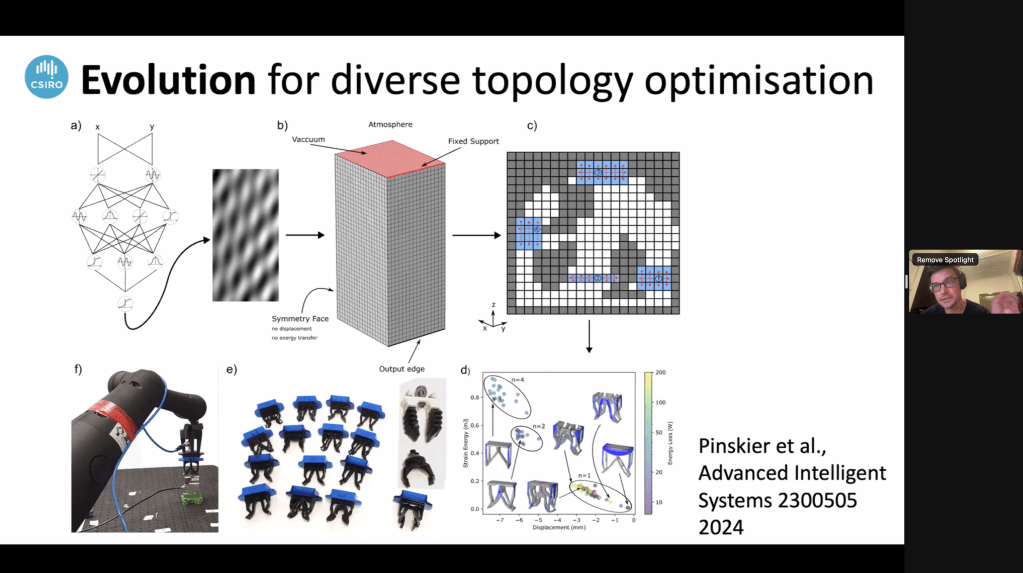
- David Howard: FROM MULTI-MATERIAL MORPHOLOGY TO JAMMING JOINTS: EMBODIED INTELLIGENCE AND CSIRO SOFT ROBOTICS
- Abstract: This talk discusses the necessity for embodied intelligence principles to be used when designing field robotic systems, and the critical role that computational design and AI can have in bringing such systems to life. Using recent examples from CSIRO’s soft robotics work, we’ll explore how approaches from seemingly-unrelated fields such as drug discovery can be combined to create a new type of robot design and generation architecture to realise embodied intelligence.
- PANEL DISCUSSION
AFTERNOON SHORT TALKS (VIDEOS)
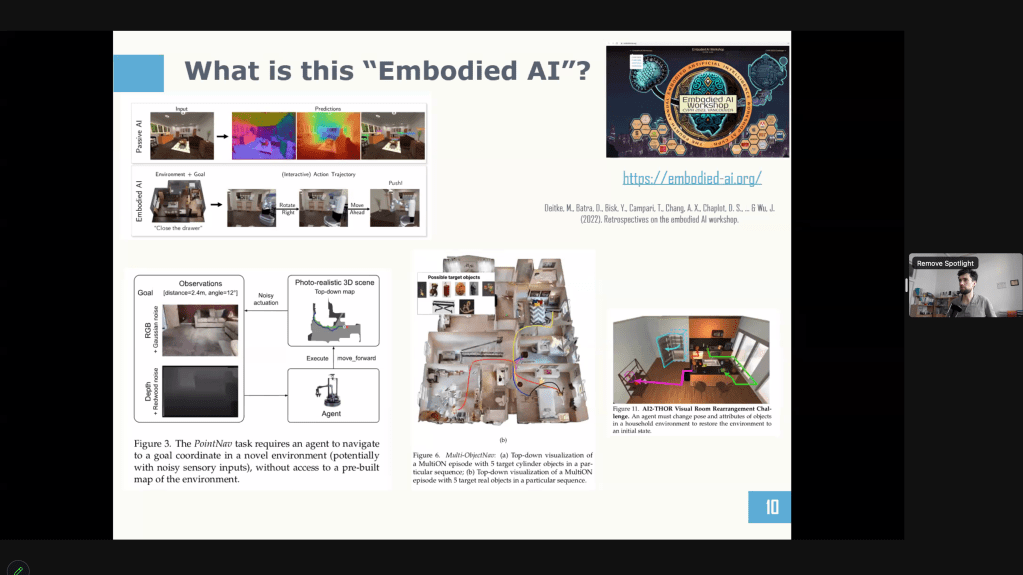
- Matej Hoffmann: EMBODIED AI GENERALIZING ACROSS ROBOT BODIES – IS IT FUNDAMENTALLY FLAWED?
- Abstract: There is a growing interest in Embodied AI in the machine learning, deep learning, computer vision, and robotics communities. The rapid advances in this field (e.g., https://www.deepmind.com/blog/scaling-up-learning-across-many-different-robot-types) seem to deny the fundamentals of embodied cognition, namely that intelligence is constitutively shaped by the body it resides in and hence different robot bodies should have different “brains”. Applying Large Language Models (LLMs) to robotics seems inherently prone to the grounding problem – how can a model that has “read the whole Internet” be able to meaningfully command a mobile robot or a robot arm robot with their completely different sensorimotor characteristics and hence affordances?
- Mariana Medina Sanchezicia Monje Micharet: SOFT AND SMART MEDICAL MICROROBOTS FOR GYNECOLOGICAL HEALTHCARE
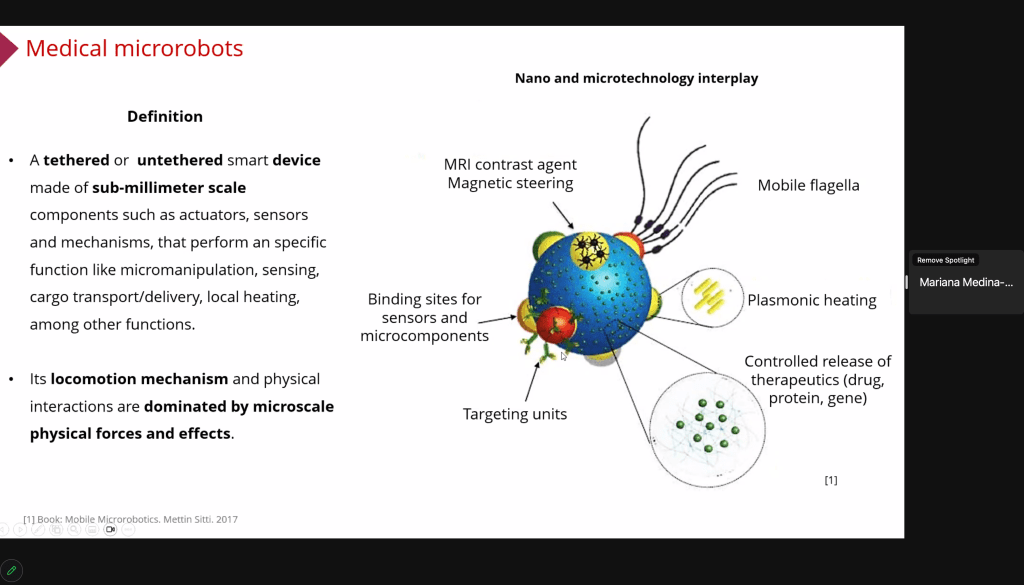
- Abstract: Medical microrobots are tiny structures capable of responding to chemical cues, external physical fields, or motile cells and microorganisms. These diminutive devices hold the promise of conducting non-invasive procedures with targeted precision, including drug delivery, cell-based therapy, and microsurgery. I will talk about the latest advancements in fabrication techniques and materials utilized to develop multifunctional, biocompatible, and biodegradable medical microrobots. Primarily envisioned for applications in gynaecological healthcare, these microrobots are designed for localized cancer treatment and for assisting reproduction in vivo in cases of infertility. For gynaecological cancer treatment, various species’ sperm have been employed as carriers for anticancer drugs, targeting cervical and ovarian cancer tumor spheroids. Likewise, in the field of assisted reproduction, medical microrobots play a crucial role in augmenting sperm transport in instances of diminished motility or count, and in facilitating embryo implantation during recurrent failures. Nevertheless, as we strive to advance these technologies into preclinical models and potentially larger animal subjects, we confront numerous challenges, which I will address in the latter part of my presentation.
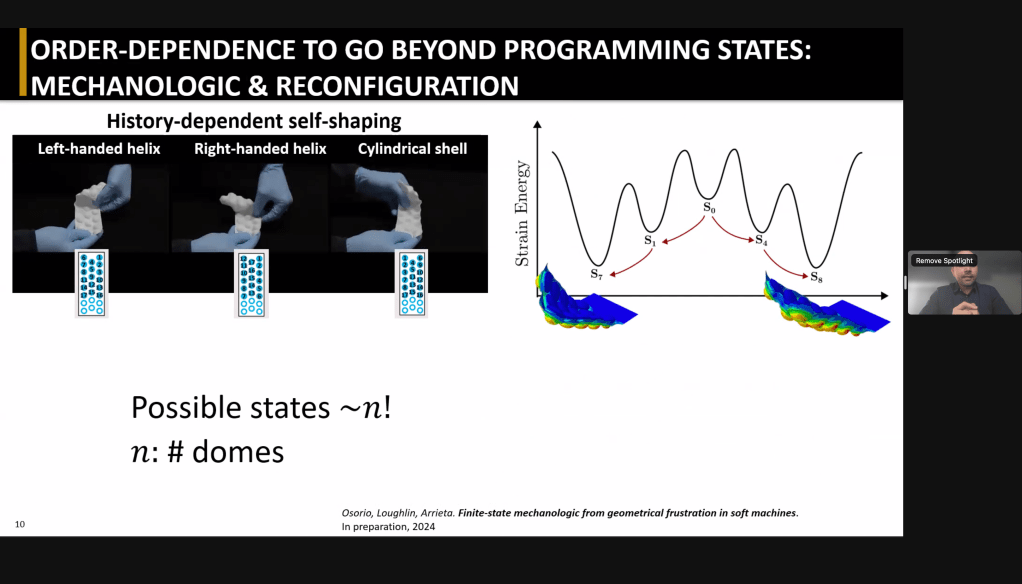
- Andres Arrieta: EMBODYING MECHANICAL INTELLIGENCE FROM GEOMETRY AND CONSTRAINTS
- Abstract: Recently, metamaterials have been used to process information by exploiting their ability to change shape and stiffness, conform to different bodies, and complement binary-based mechanical computing by introducing concurrent information processing and memory formation, similar to the processes in physical reservoir computers. A specific class of metamaterials featuring dome-shaped units exhibit order-dependent deflections (non-Abelian behavior) that are reminiscent of spin glasses, a type of condensed matter exhibiting strong state degeneracy (multiple energy minima) enabling in-material memory and computation. This state degeneracy stems from the inability to simultaneously minimize all the local (mechanical) interactions due to deformation incompatibilities or constraints, a phenomenon known as geometrical frustration. Appropriate design of geometrical frustration allows for accommodating these local incompatibilities, whereby the accumulated collective deflections result in substantial three-dimensional reshaping while maintaining low local strains. In this talk, we show how exploiting the interplay between geometry and constraints allows for leveraging the resulting strong multistability to embody intelligence into robotic systems purely from mechanics. We illustrate intelligence from geometrical frustration via pneumatically actuated soft grippers with encoded multiple accessible, stable states that offer a route to open-loop shape reconfiguration. Informed by the mechanics of multistable metamaterials, we design coexisting states resembling different actuation modes in soft manipulators, including grasping, power grasping, and twisting. We achieve this by leveraging distinct path-dependent activation sequences to access desired coexisting states informed by the interaction of the dome-shape units. We demonstrate how to describe this system as a temporal finite state machine that yields different output shapes depending on the recorded sequence. Our strategy offers a new route for controlling soft robots, exploiting the nonlinear mechanics of multistable structures to the designer’s advantage, thus opening the avenue for embodying finite-state machine-based control strategies without closed-loop control for soft structures.
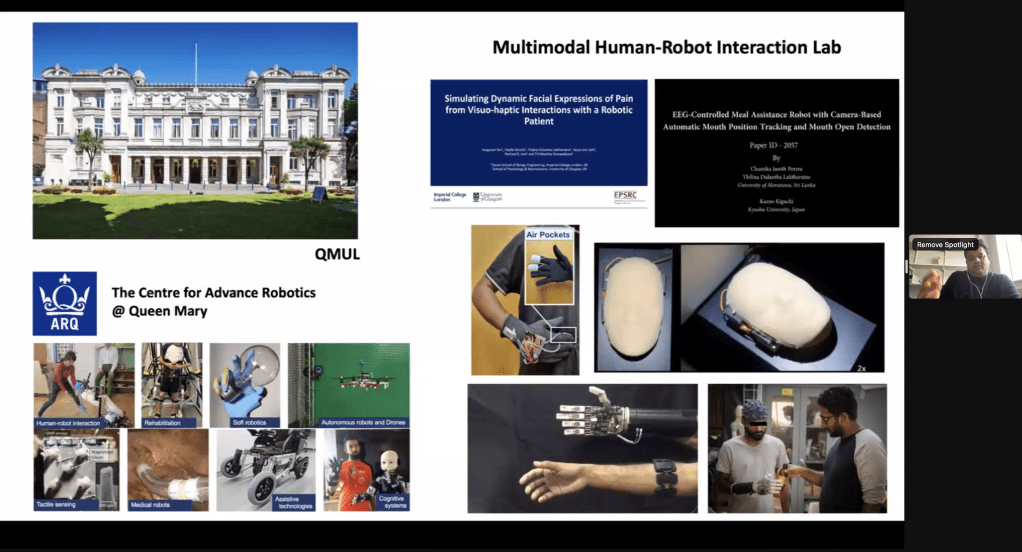
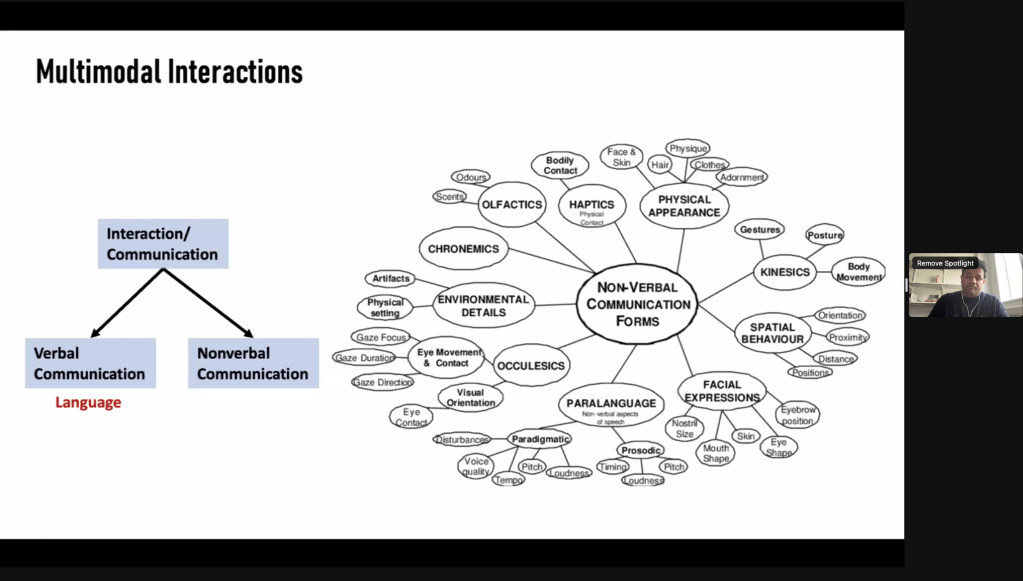
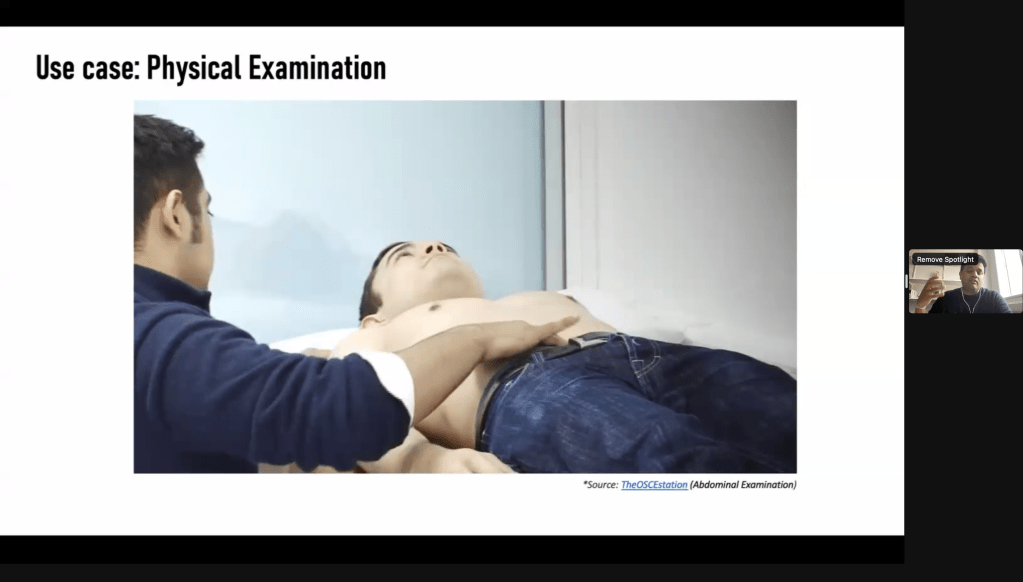
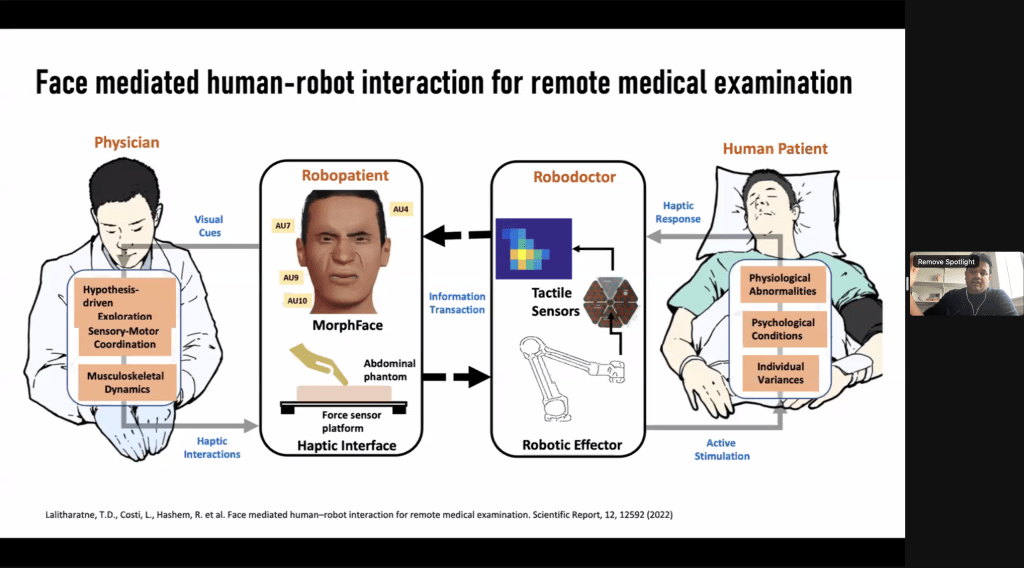
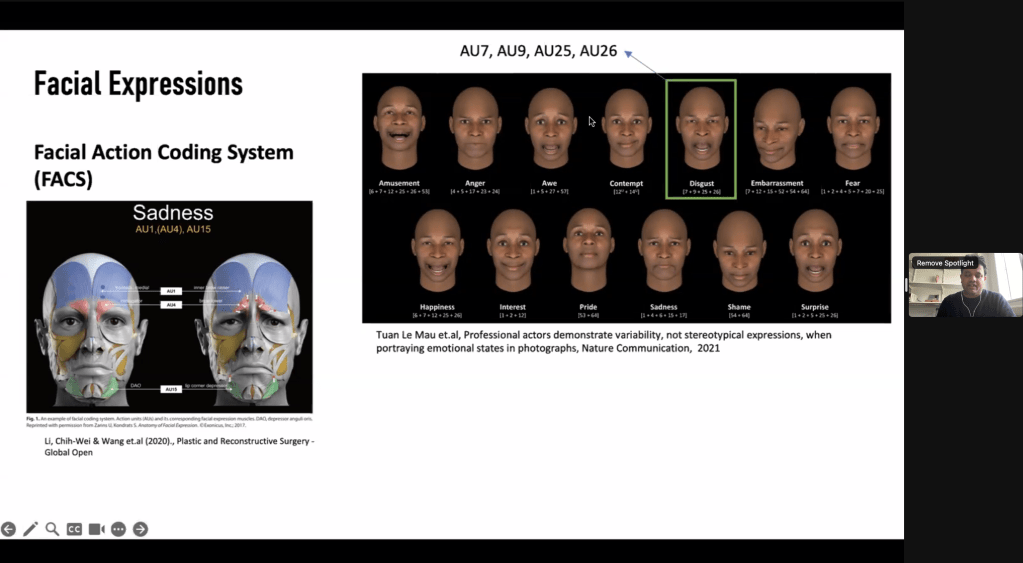
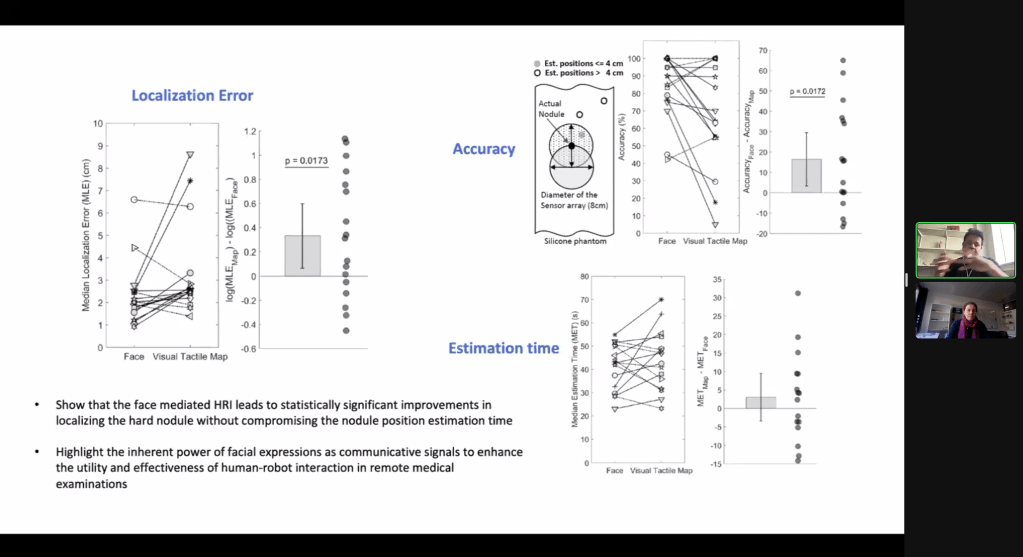
- Thilina Lalitharatne: TOWARDS MULTIMODAL HUMAN-ROBOT INTERACTIONS FOR REMOTE EXAMINATIONS AND TELEOPERATION
- Abstract: Remote examinations and teleoperation offer numerous advantages across various domains, including remote patient diagnoses, minimally invasive robotic surgery, and teleoperating in extreme environments like nuclear decommissioning. These applications require real-time multimodal sensing and feedback, encompassing visual, haptic, and auditory signals, which are vital for effective diagnosis and control. In my talk, I will be particularly focused on use cases around remote patient diagnosis that enable patients in regions with limited access to specialized medical professionals, allowing them access to doctors for early diagnosis and treatment through new multimodal HRIs.
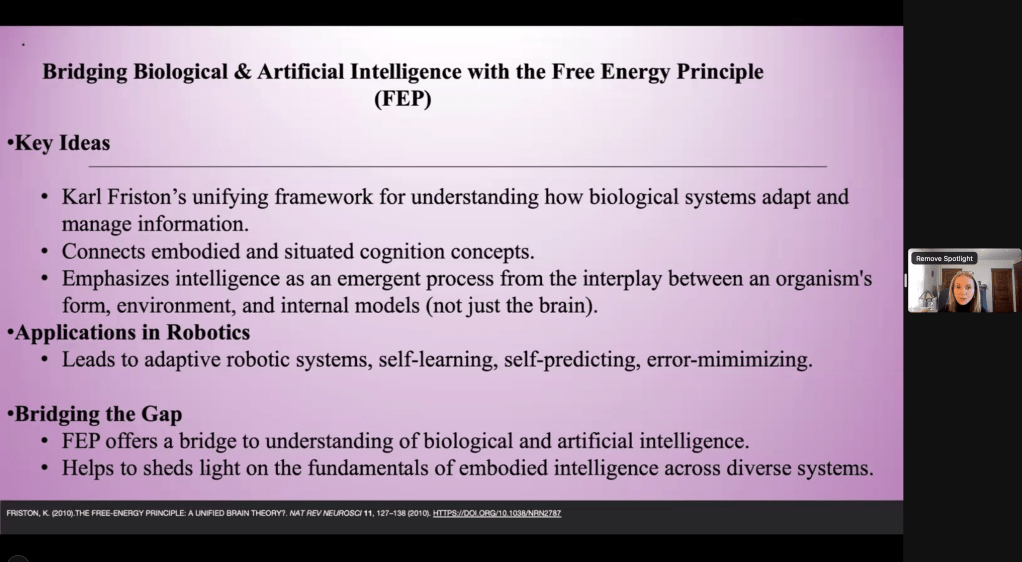
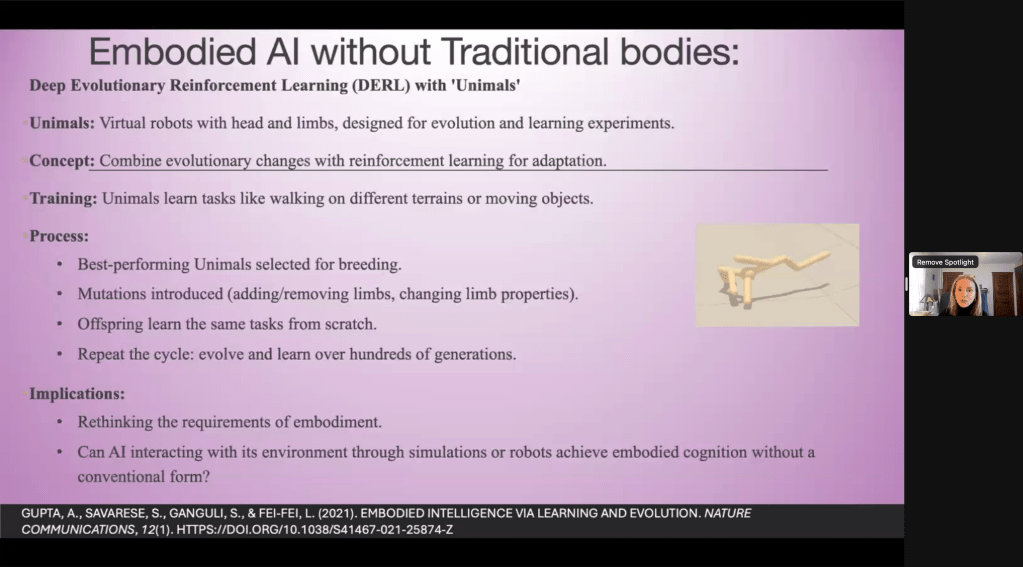
- Sheila Macrine: RELATIONSHIP BETWEEN HUMAN COGNITION AND AI
- Abstract: No abstract is currently available
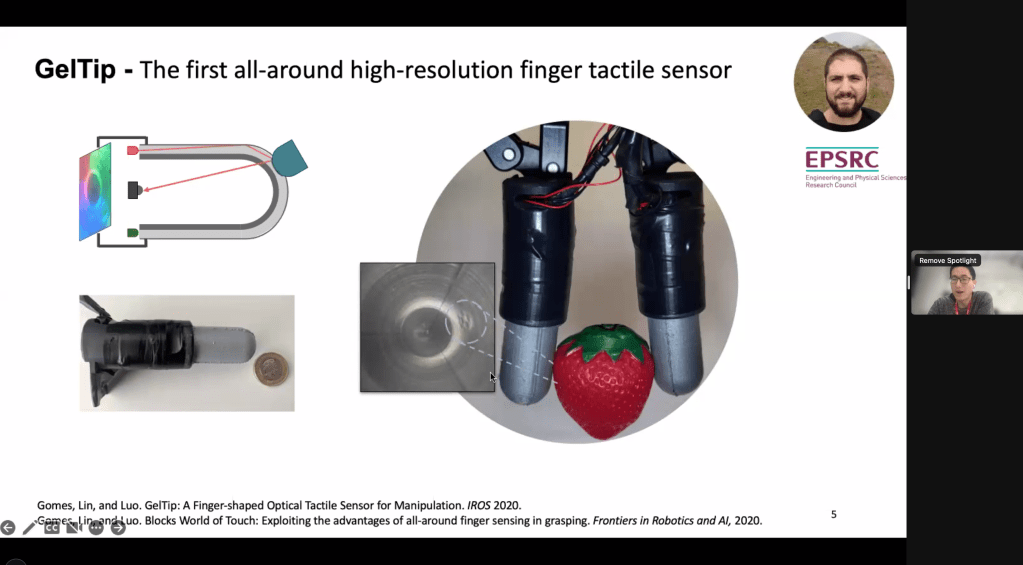
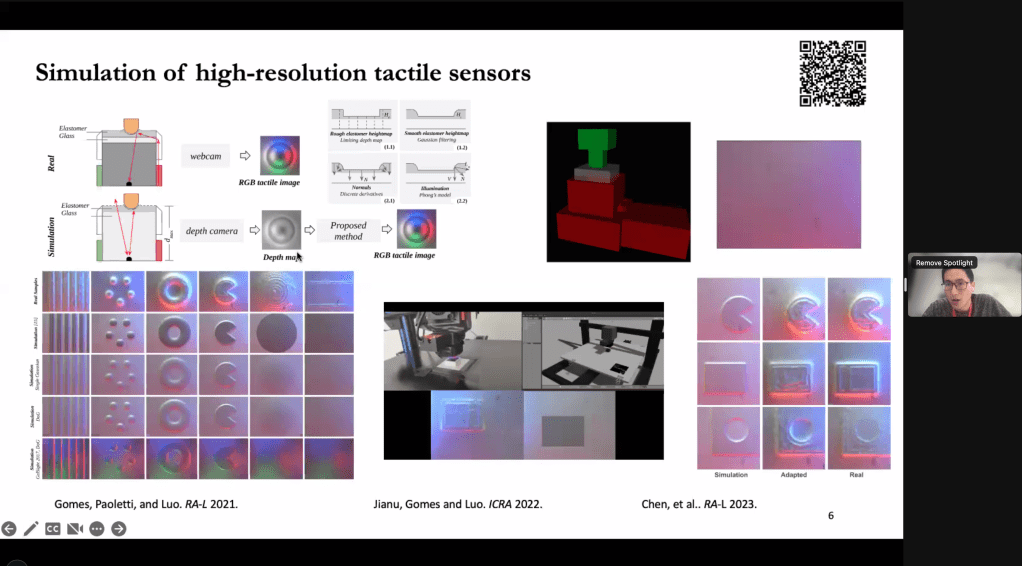
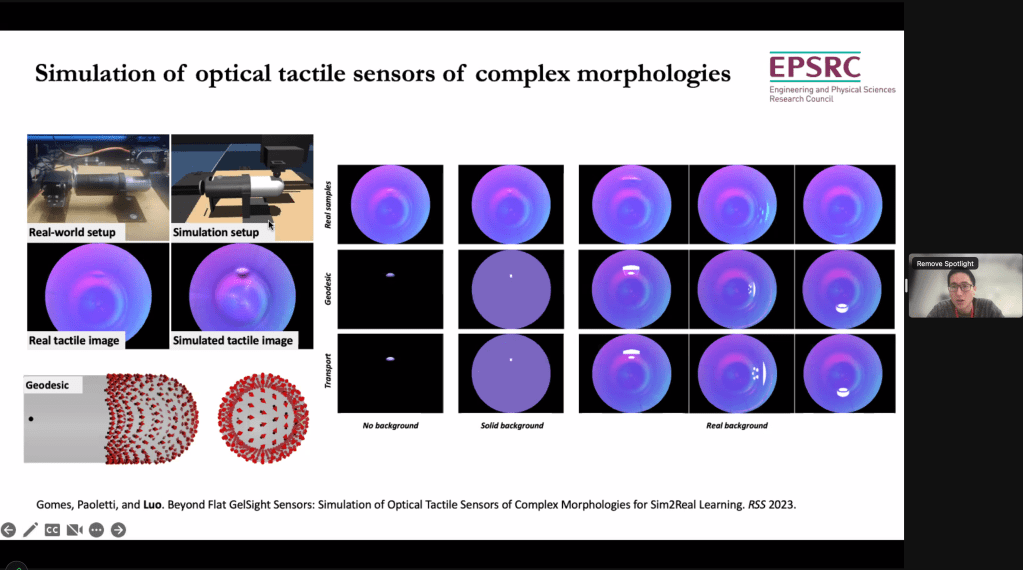
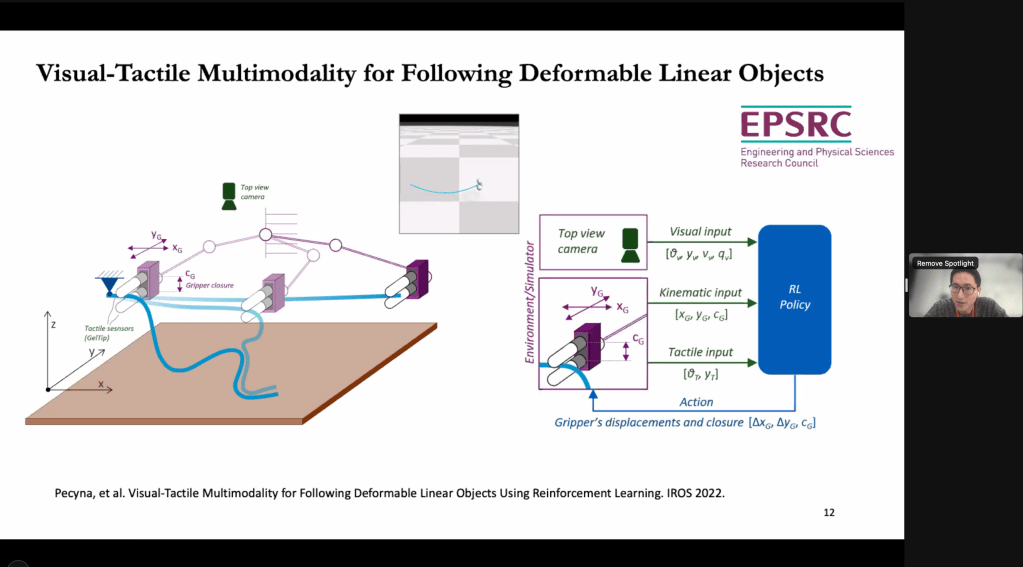
- Shan Luo: ROBOT EMBODIMENT THROUGH VISUO-TACTILE INTELLIGENCE
- Abstract: This talk explores the important role of visuo-tactile intelligence in shaping robot embodiment, enabling their interactions with the physical world. By integrating visual and tactile sensory modalities, robots attain a deeper understanding of their surroundings, facilitating perception for agile grasping and manipulation. Drawing upon recent advancements in tactile sensor development, multimodal integration, and simulation techniques, I will delve into the foundations of visuo-tactile intelligence and its implications for robotics. Through case studies and experimental insights, I will share how this paradigm shift in robotic perception enhances adaptability, dexterity, and autonomy.
- PANEL DISCUSSION
CLICK ON IMAGES TO ENLARGE