PRESENTATIONS
DAY 1: 20 MARCH 2024

SESSION 1 (BS 1-1-1): SOFT ROBOTICS
| THILINA LALITHARATHE | Chair’s Introduction |
| Abdulaziz Alkayas | A Minimalist Approach to Modeling Strain-Parametrized Soft Robotics |
| Thilina Lalitharatne | Soft robotics approaches towards multimodal human-robot interactions |
| Leone Costi | Smart Soft Interfaces for a RobotPatient |
| Sojiro Sugiura | Wearable robotics controlling ground contact points |
| Miriam Filippi | Strategies for system integration in organic machines |
SESSION 2 (BS 1-1-2): ADAPTIVE BEHAVIOURS
| PERLA MAIOLINO | Chair’s Introduction |
| Oliver Brock | The Relationship of Embodiment and Computation |
| Avel GUÉNIN-CARLUT | Embodiement, Contextuality, and Material Engagement |
| Jaemin Eom | Soft Deployable Suction Gripper for Robust Picking against Depth and Tilt Errors |
| Taku Sugiyama | Utilising Redundancy in Musculoskeletal Systems for Adaptive Stiffness and Muscle Failure Compensation |
| Loong Yi Lee | Down the Rabbit Hole: Exploiting Airflow Interactions for Morphologically Intelligent Retracting Vacuum Grippers |
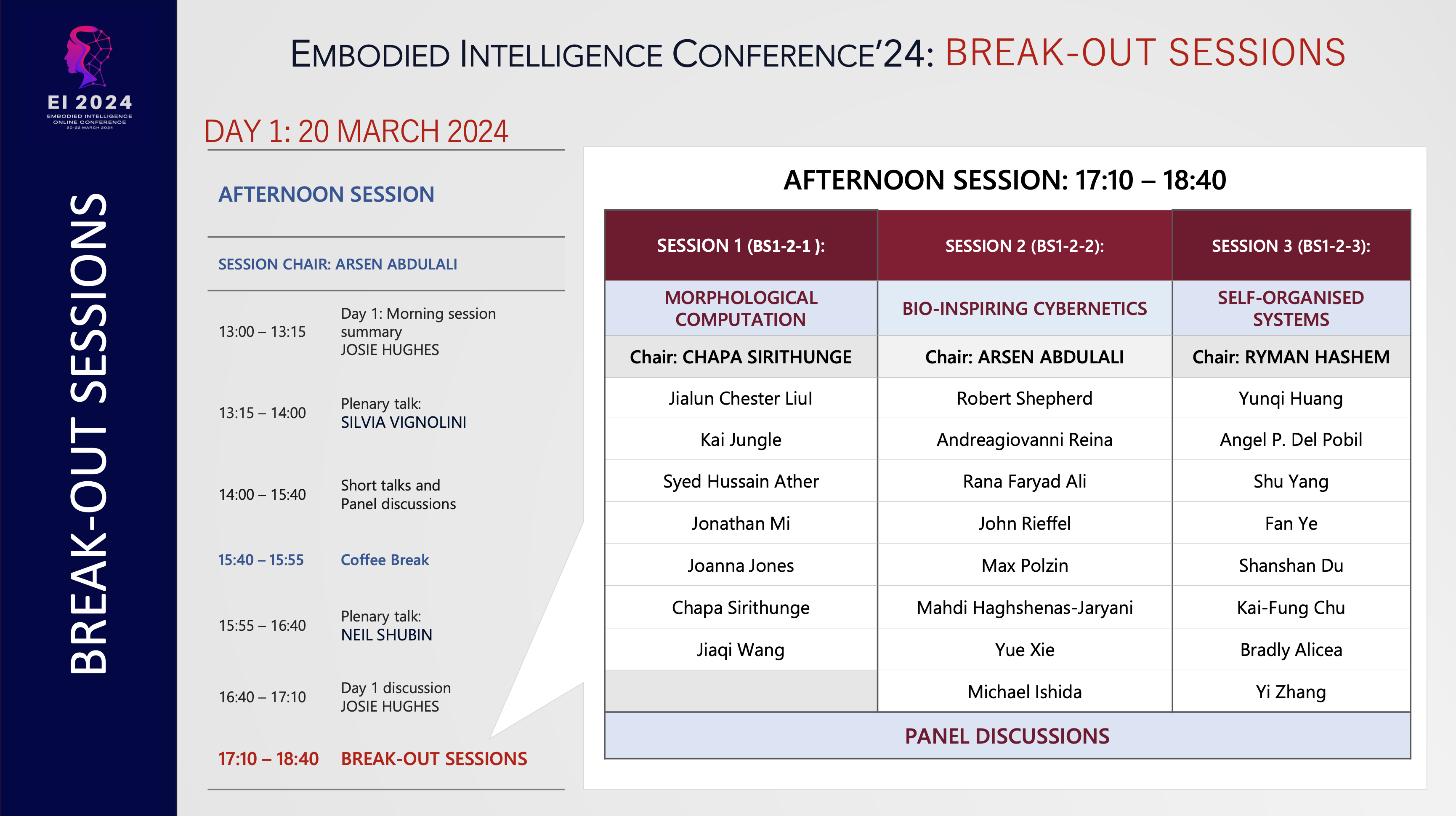
SESSION 1 (BS 1-2-1): MORPHOLOGICAL COMPUTATION
| CHAPA SIRITHUNGE | Chair’s Introduction |
| Jialun Chester Liu | Thermally-activated Reactor for Untethered Soft Robotic Actuation |
| Kai Junge | Compliance beyond safety for robotic manipulation |
| Syed Hussain Ather | Navigating Reality: Exploring Spatial Cognition, Virtual Environments, and Philosophical Implications |
| Jonathan Mi | Highly Modular, Variable-Stiffness Tensegrity Robot |
| Joanna Jones | Pulsating Fluidic Sensor for Sensing of Location, Pressure and Contact Area |
| Chapa Sirithunge | Effectiveness of anthropomorphism for socially embodied robots |
| Jiaqi Wang | Lightweight Autonomous Crawling Robot Utilizing Vacuum-driven Self-sensing Origami Actuators for 3D Multi-terrain Exploration |
SESSION 2 (BS 1-2-2): BIO-INSPIRED CYBERNETICS
| ARSEN ABDULALI | Chair’s Introduction |
| Robert Shepherd | Embodied Energy with Embodied Intelligence |
| Andreagiovanni Reina | Coherent movement of error-prone individuals through mechanical coupling |
| Rana Faryad Ali | Next-Generation modalities to power and navigate miniaturized robots in complex environments (biological systems, nuclear reactors and other potential avenues) |
| John Rieffel | Robustness in Diversity |
| Max Polzin | Active and passive adaptation for robust, outdoor navigation |
| Mahdi Haghshenas-Jaryani | Leveraging Mechanical Intelligence in Learning and Control Tasks by Exploiting Coupled Active-Passive Dynamics of Underactuated Soft Robots |
| Yue Xie | Rapid design framework for soft robots |
| Michael Ishida | Paleo-inspired robotics: how robots and extant animals can be used to investigate evolution |
SESSION 2 (BS 1-2-3): SELF-ORGANISED SYSTEMS
| RYMAN HASHEM | Chair’s Introduction |
| Yunqi Huang | Interaction Shape Prediction of Soft Continuum Robots using Deep Visual Models |
| Shu Yang | Adaptive Cellular Behaviour at a Larger Scale: Bioplastic-Based Soft Robotics Enhanced by Vascular Sprouting Dynamics |
| Fan Ye | Reservoir Control: Using Reservoir Computer as a Model-free Controller |
| Shanshan Du | TBC |
| Kai-Fung Chu | Embodied Intelligence Between Autonomous and Human-Driven Vehicles |
| Bradly Alicea | Developmental Neurosimulation as a Route to Embodied Morphogenetic-inspired Intelligence |
| Yi Zhang | Virtual model control for compliant reaching under uncertainties |
DAY 2: 21 MARCH 2024

SESSION 1 (BS 2-1-1): FUNCTIONAL MATERIALS AND DESIGNS
| HUIJIANG WANG | Chair’s Introduction |
| Liang Li | RoboTwin: The Reciprocal Study Between Robotics and Biology |
| Nana Obayashi | Growth and encoding in soft robots |
| Chenying Liu | Embodied Intelligence in Origami Robots: How Could Thick-Panel Origami Contribute? |
| Seyedreza Kashef Tabrizian | Self-healing damage localization soft skin |
| Francesco Stella | Soft simulation |
SESSION 2 (BS 2-1-2): AI for ROBOTICS
| THOMAS THURUTHEL | Chair’s Introduction |
| Xiaoping Zhang | SResearch on intrinsic motivation in robot cognition |
| Stefan Ilic | AI in the domain of cooking and food science |
| Veikko Sariola | Soft pneumatic strain sensors |
| Marta Zheplinska | Synthesis of Artifacts and Interfaces Using Categorical Methods |
| Raye Yeow | Hyper-Versatile Hybrid Robotic Gripper: Synergizing Mechanical and Machine Intelligence |

SESSION 1 (BS 2-2-1): HUMAN-CENTRED SYSTEMS
| CHAPA SIRITHUNGE | Chair’s Introduction |
| Adam Safron | On the virtues of being squishy: developmental soft robotics and the bootstrapping of natural and artificial general intelligences |
| Georgina Montserrat Reséndiz-Benhumea | Social Ontogeny and Dyadic Body Memory: Minimal Agent-Based Modeling within a 4E Cognition Approach |
| Luca Sarramone | Does embodiment affect cognitive spatial maps? |
| Maria Elena Giannaccini | Making soft robots for humans |
| Tara Chand | Predictability of touch stimuli and pleasantness during affective touch |
| Mahault Albarracin | Feeling Our Place in the World: An Active Inference Account of Self-Esteem |
| Magdalena Kersting | Bridging Embodied Intelligence and Education: A Cross-Disciplinary Exploration |
| Elijah Almanzor | Twitch-Based Sensory-Motor Coordination: From Reflexes to Coordinated Behaviour |
SESSION 2 (BS 2-2-2): COMPUTATIONAL APPROACHES
| KAI-FUNG CHU | Chair’s Introduction |
| Adamya Singh Dhaker | Translating Biology to Robotics Through Multiphysics Modelling |
| Alexandra Nilles | Communication-Free Consensus and Averaging in Multi-Robot Systems |
| Carlo Alessi | Ablation of a continuum mechanical model for a soft arm and control by reinforcement learning |
| David Hardman | Inbuilt redundancies in multimodal sensor design |
| Jesse Parent | Diverse Intelligences and Diverse Terminology – Considerations on common language and models |
| Barry Mulvey | Sensor Integration for Embodied Interaction in Unstructured Environments |
| W. B. Langdon | Deep Mutations have Little Impact |
| Sam Schaefer | Approximate simulation as an artificial imagination for solving complex manipulation tasks |
SESSION 2 (BS 2-2-3): CYBER-PHYSICAL SYSTEMS
| ERIN NOLAN | Chair’s Introduction |
| Huijiang Wang | Emotional alignment for human-robot cooperative musical robots |
| Mathieu Lefort | MeSMRise (Multimodal deep SensoriMotor Representation learning) |
| Vijay Chandiramani | Quantifying Embodiment in a legged robot |
| Swapnil Kumar | Stress distribution analysis and improvisations using Machine Learning throughout the craniofacial region following the maxillary expansion |
| Jose A Fernandez-Leon | Tailoring spatial navigation dynamics in toroidal-based representations |
| Xiang Wang | Highly scattering distributed fiber optic sensing technology |
| Andrea Protopapa | Domain Randomization for Robust, Affordable and Effective Closed-loop Control of Soft Robots |
| Erin Nolan | A Framework to Define Embodied Intelligence Using A Systems Approach and Reverse Mathematics |
DAY 3: 22 MARCH 2024
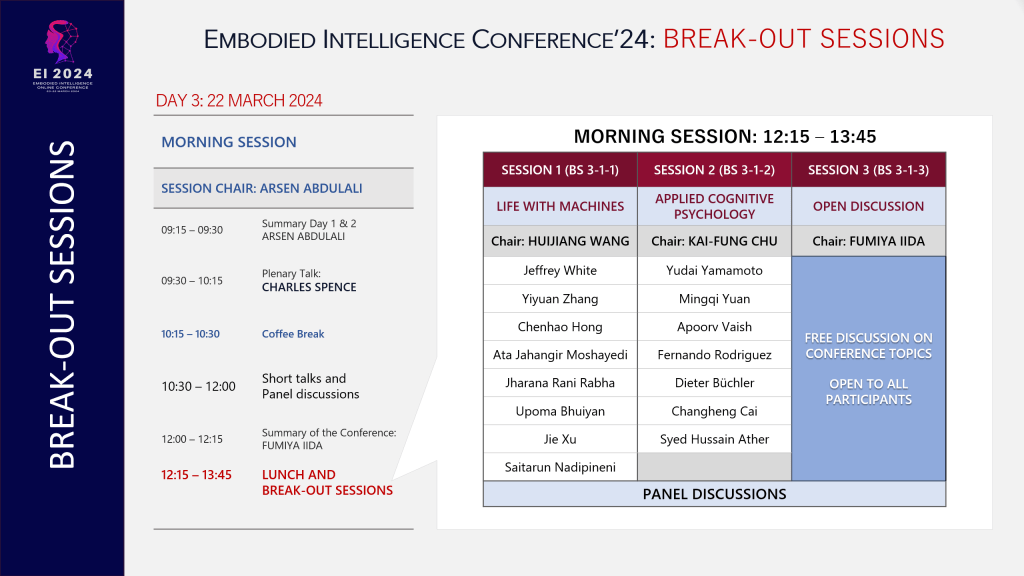
SESSION 1 (BS 3-1-1): LIFE WITH MACHINES
| Huijiang Wang | Chair’s Introduction |
| Jeffrey White | Embodied authenticity in robots |
| Yiyuan Zhang | A glimpse into mechanical intelligence from passive joints and links |
| Chenhao Hong | Improving SSVEP-based Assisted Feeding System using Machine Learning |
| Ata Jahangir Moshayedi | Food Delivery Robot as the Service Robot Evolution, Efficiency, and Performance Enhancement |
| Jharana Rani Rabha | Fundraising and Project Development |
| Upoma Bhuiyan | TBC |
| Jie Xu | Embodied Intelligence in Additive Manufacturing |
| Saitarun Nadipineni | Soft Tactile Sensing Glove for Self-Physical Examinations |
SESSION 2 (BS 3-1-2): APPLIED COGNITIVE PSYCHOLOGY
| Kai-Fung Chu | Chair’s Introduction |
| Yudai Yamamoto | A Study of the Effects of Elastic Ligaments on the Outside Pass in Soccer |
| Youning Duo | TBC |
| Mingqi Yuan | Intrinsically-Motivated Reinforcement Learning |
| Apoorv Vaish | Co-Designing Manipulation Systes Using Task-Relevant Constraints |
| Fernando Rodriguez | Modeling cognitive temporality, first sketches |
| Dieter Büchler | Safe & Accurate at Speed with Tendons: A Robot Arm for Exploring Dynamic Motion |
| Changheng Cai | TBC |
| Syed Hussain Ather | Mapping the Mind: Navigating Real and Virtual Realities |
SESSION 3 (BS 3-1-3)
| Fumiya Iida | Chair Introduction |
| OPEN DISCUSSION | ALL PARTICIPANTS ARE WELCOME |
