22 MARCH 2024
PLEASE NOTE THAT OWING TO COPYRIGHT OR INTELLECTUAL PROPERTY PERMISSIONS WE ARE UNABLE TO SHARE RECORDINGS OF SOME SESSIONS
VIDEO: DAY 1 & 2 SUMMARY: Arsen Abdulali (University of Cambridge, UK)
VIDEO: CONFERENCE CLOSING REMARKS: Fumiya Iida (University of Cambridge, UK)
FINAL PLENARY TALK

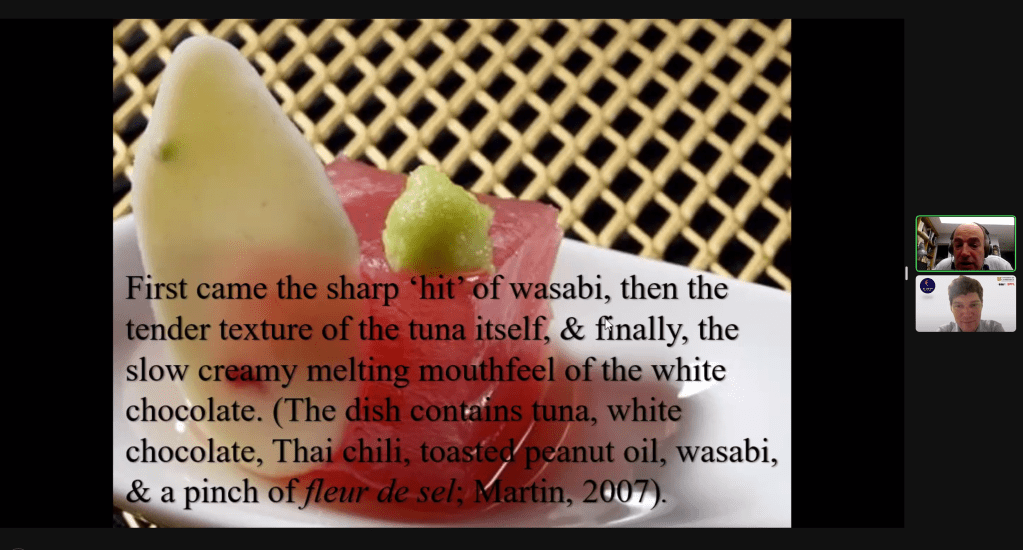
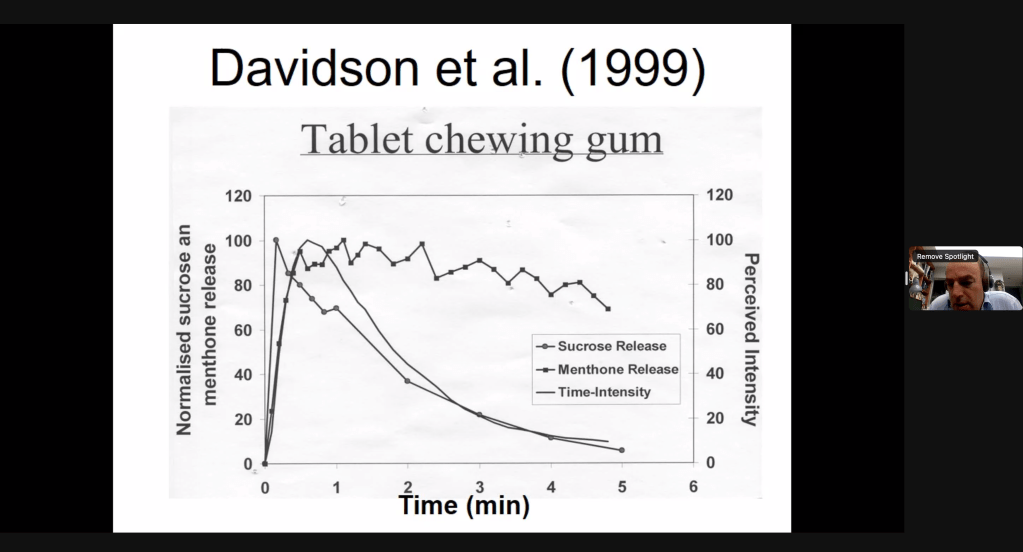
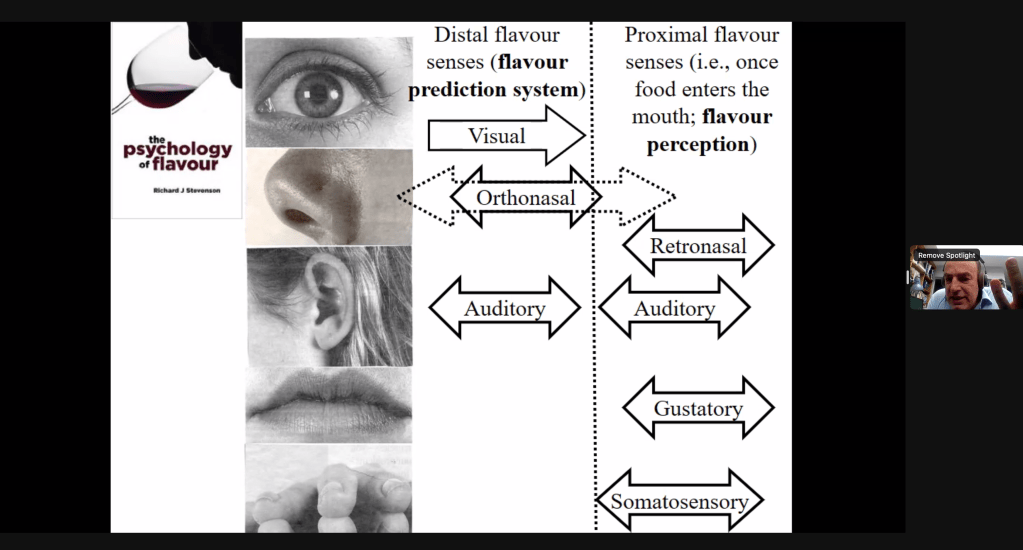
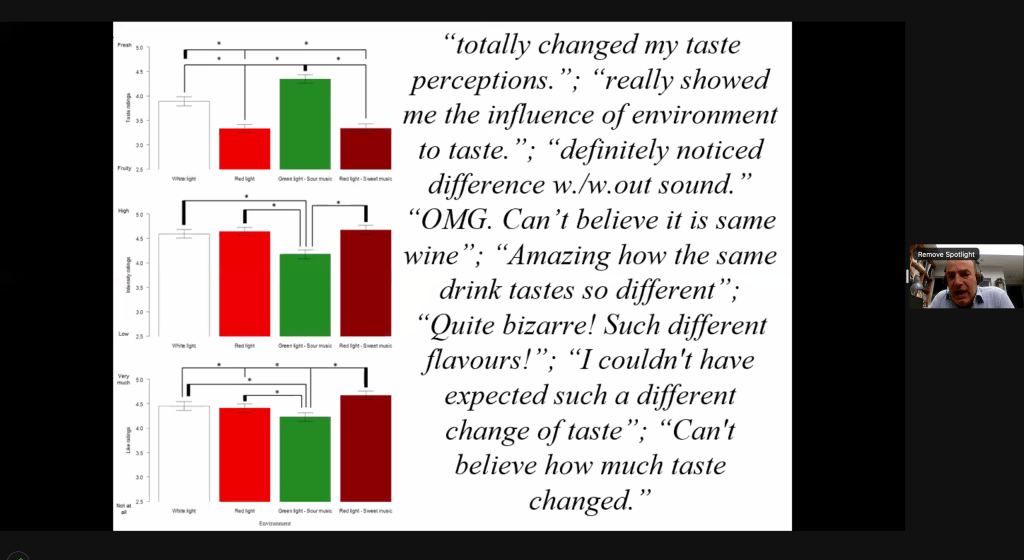
CHARLES SPENCE (Crossmodal Research Laboratory, University of Oxford, United Kingdom)
VIDEO: GASTROPHYSICS: ON THE COMPLEXITY OF MULTISENSORY FLAVOUR PERCEPTION
Abstract: Soft robotics, characterized by its potential to enable adaptive and safe interactions with the environment, represents a paradigm shift in robotics towards embodying intelligence through the nuanced interplay between soft materials and their surroundings. Many approaches in soft robotics focus on component-level innovations, leveraging non-linear material properties for specific functionalities. However, the integration of these components into cohesive, multi-component systems challenges the conventional centralized control models. Drawing inspiration from the decentralized and embodied cognition observed in invertebrates, this work introduces an approach that prioritizes local feedback, simplicity in design, adaptability, and robustness over precision. We develop a soft robotic platform that employs modular building blocks that consist of actuators, sensors and computation to enable sensory feedback loops for autonomous behavior and locomotion, including phototaxis and adaptive responses to physical damage. Our findings demonstrate the feasibility of decentralized control in soft robotics, offering a blueprint for designing resilient, autonomous systems capable of complex behaviors without relying on centralized processing or explicit programming.

FINAL SHORT TALK SESSION (VIDEOS)
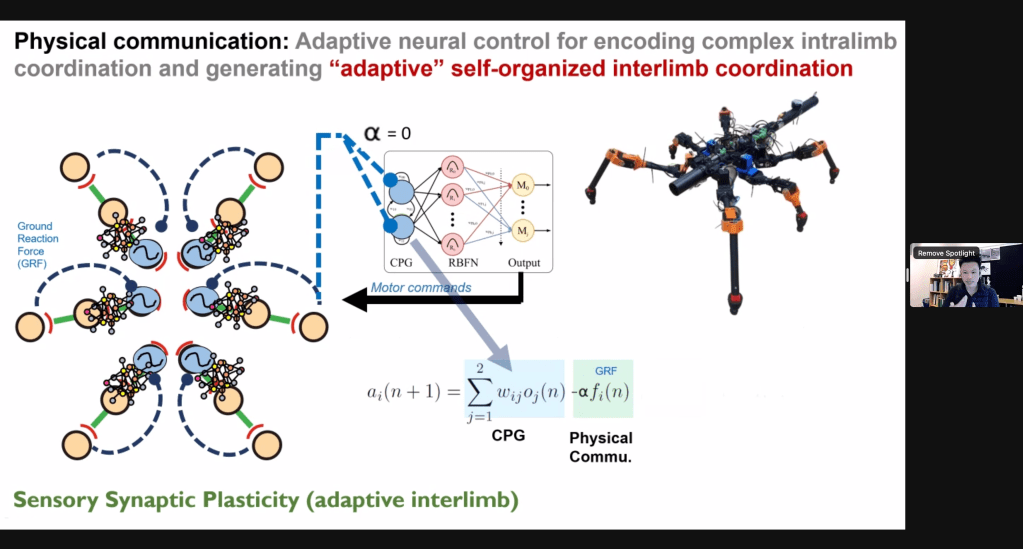
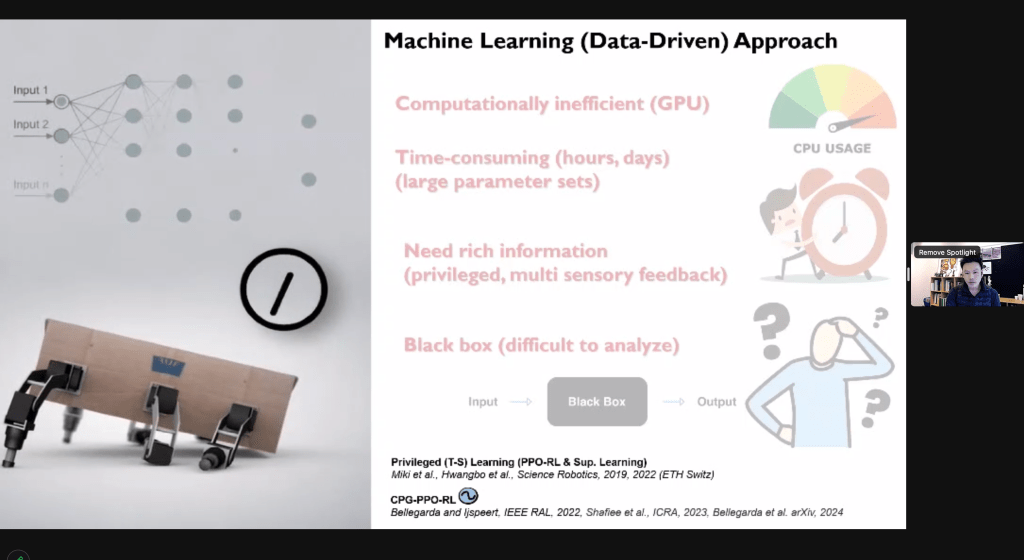
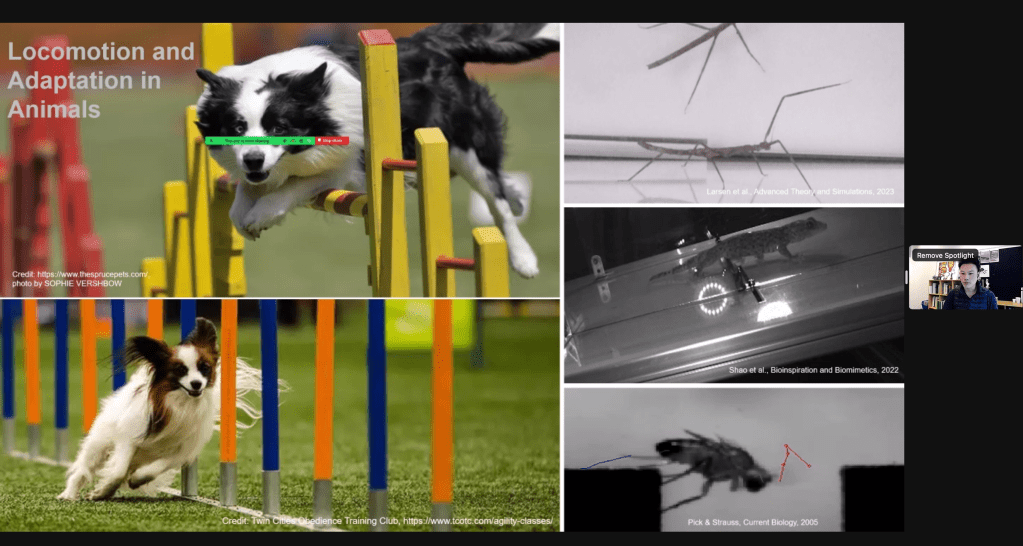
- Poramate Manoonpong: EMBODIED ADAPTIVE NEURAL CONTROL FOR RAPID SELF-ORGANIZED LOCOMOTION AND ADAPTATION: FROM BIOLOGICAL INVESTIGATION TO ROBOT IMPLEMENTATION
- Abstract: Animals exhibit versatile and elegant behaviors through adaptive intralimb and interlimb coordination. Their self-organized movements convey an impression of adaptability, robustness, and motor memory. However, replicating their adaptive coordination control mechanisms in artificial legged systems remains challenging. While attempts have been made to utilize machine learning for the task, this data-driven learning approach still demands substantial computational resources and extensive time for learning—ranging from hours to days or even weeks. In this talk, I will introduce embodied adaptive neural control, capable of emulating natural abilities by facilitating adaptive physical and neural communications. I will demonstrate how the integration of these two forms of communication through adaptive neural control can achieve rapid and robust self-organized locomotion within a few seconds. The introduced adaptive neural control architecture can also serve as a basis for developing “GEneral NEural control for Self-organIsed emergent behavior of legged/limbed Systems (GENESIS)”.
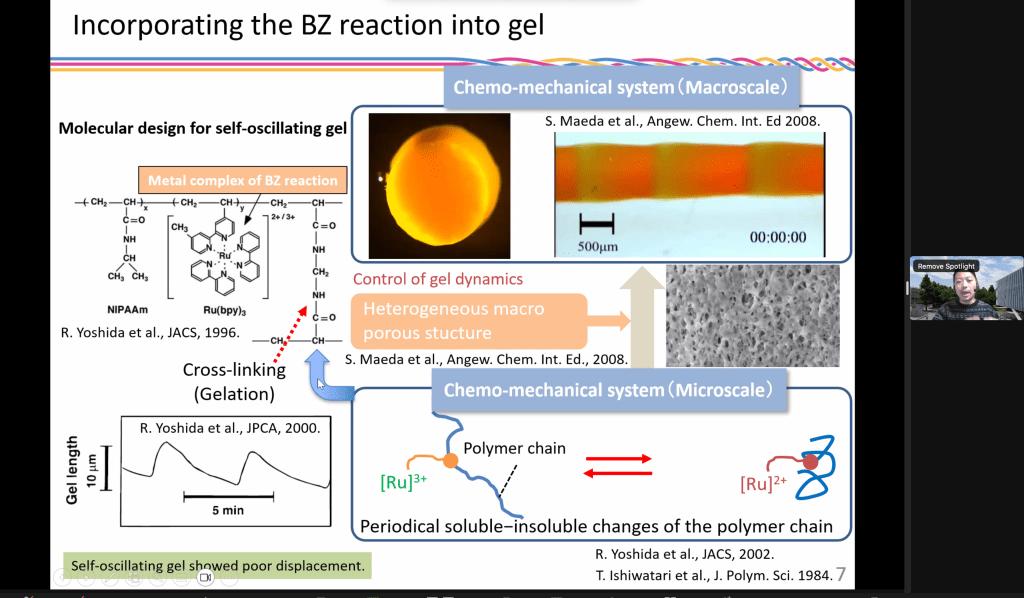
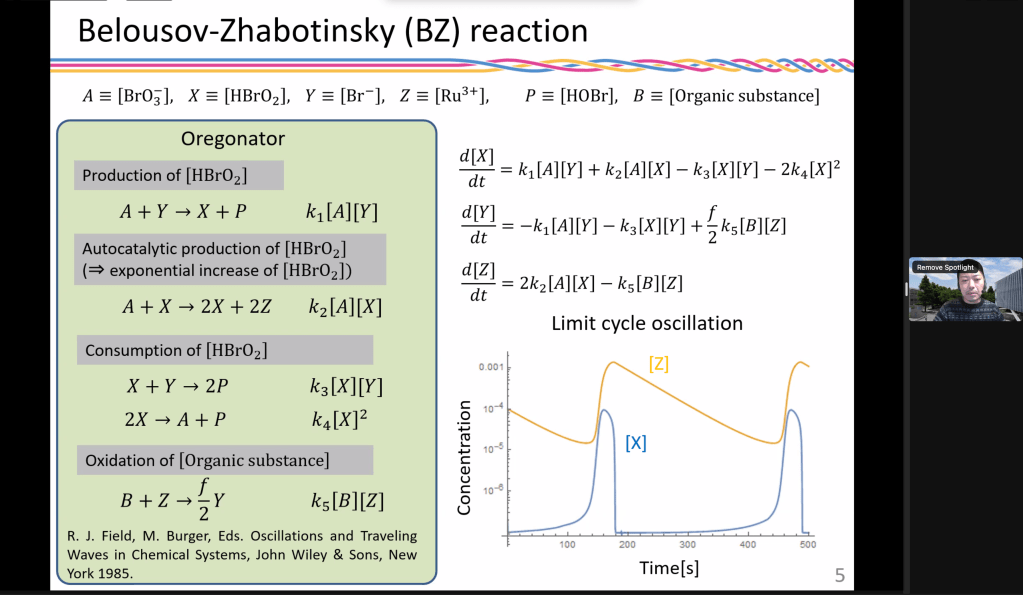
- Shingo Maeda: AUTONOMOUS GEL MACHINES” DRIVEN BY A CHEMICAL REACTION NETWORK
- Abstract: No abstract is currently available
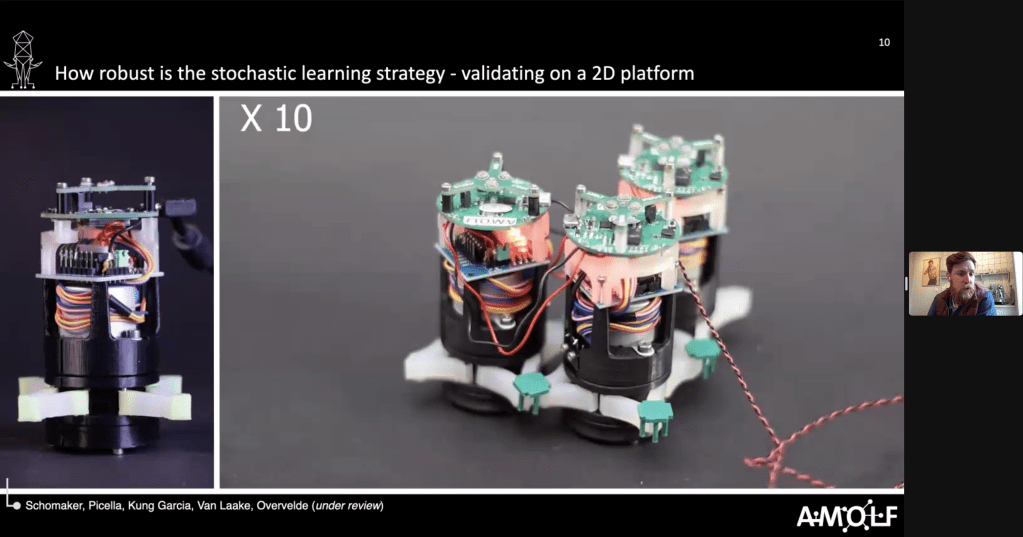
- Bas Overvelde: AUTONOMOUS PHOTOTAXIS IN SOFT MODULAR ROBOTS ENABLE BY EMBODIED LEARNING
- Abstract: Soft robotics, characterized by its potential to enable adaptive and safe interactions with the environment, represents a paradigm shift in robotics towards embodying intelligence through the nuanced interplay between soft materials and their surroundings. Many approaches in soft robotics focus on component-level innovations, leveraging non-linear material properties for specific functionalities. However, the integration of these components into cohesive, multi-component systems challenges the conventional centralized control models. Drawing inspiration from the decentralized and embodied cognition observed in invertebrates, this work introduces an approach that prioritizes local feedback, simplicity in design, adaptability, and robustness over precision. We develop a soft robotic platform that employs modular building blocks that consist of actuators, sensors and computation to enable sensory feedback loops for autonomous behavior and locomotion, including phototaxis and adaptive responses to physical damage. Our findings demonstrate the feasibility of decentralized control in soft robotics, offering a blueprint for designing resilient, autonomous systems capable of complex behaviors without relying on centralized processing or explicit programming.
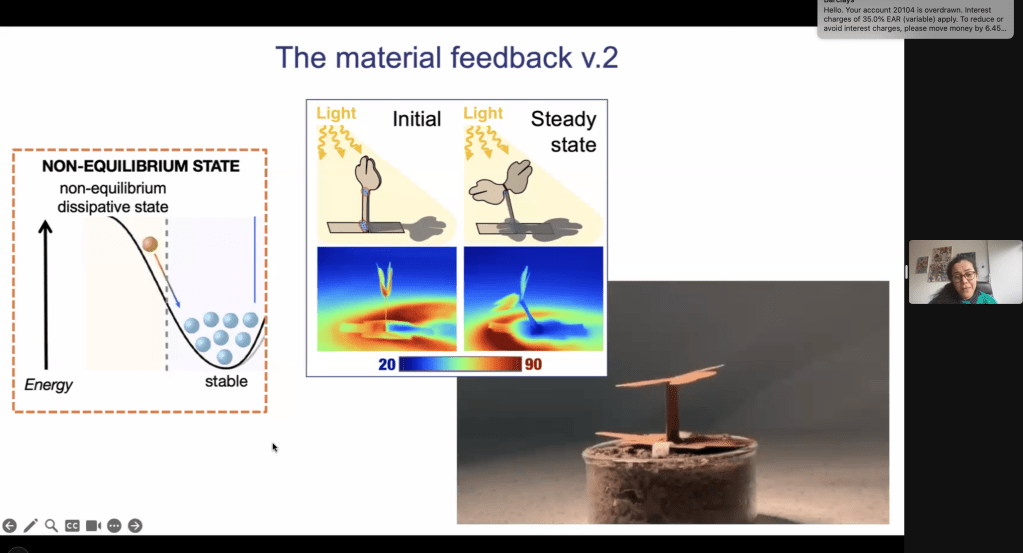
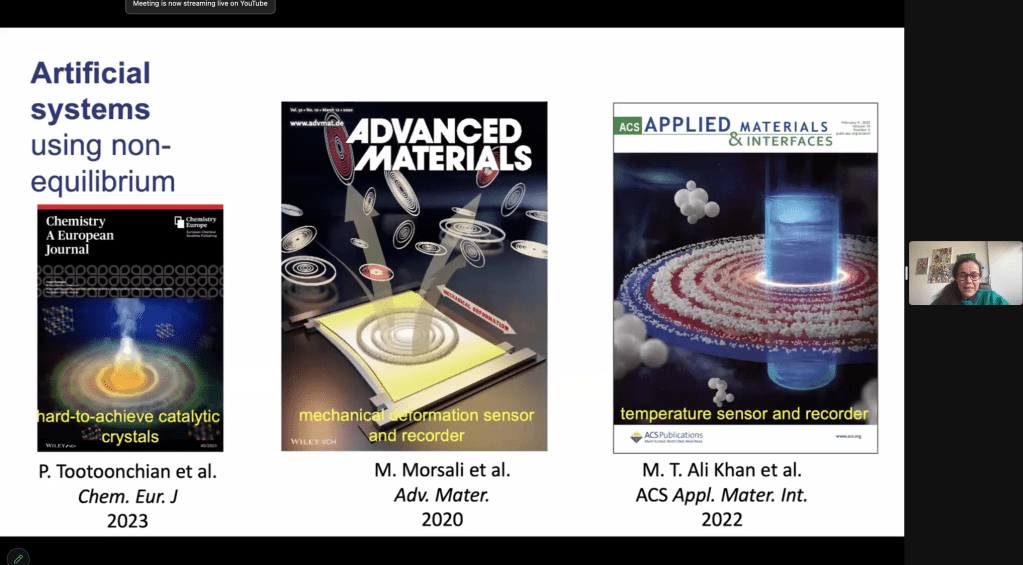
- Bilge Baytekin: SELF-REGULATION IN PLANT ROBOTS: MECHANICAL, PHYSICAL, AND CHEMICAL CONTROL MECHANISMS
- Abstract: Conventional robots are controlled by feedback mechanisms that include the sensing of the environment and the response to the environment with appropriate sensors and electronic feedback mechanisms. The hardware and electronics needed to sustain the control in conventional robots do not comply with the agile, low-weight soft robot. On the other hand, soft robots can be controlled through other non-mechatronic mechanisms. Some chemical concepts can be used to achieve the sensing, actuation, and feedback required for autonomous motion in soft robots made from soft materials like polymers and hydrogels. Some examples of our simple, self-regulation plant robots will be presented here. These systems operate autonomously with (sun) light and can turn on and follow the source independently without outer control. In the first example, the robot is operated by optomechanical feedback. The control mechanism involves the appropriate geometrical arrangement of shape memory alloys and their reversible thermal contraction. In the second one, the reversible hydration/dehydration of water from hydrogels is used to build the feedback control in the system. Finally, it will be shown that the control can be tuned using some physical chemistry. ‘A pinch of salt’ can add to the hydrogel system’s embodied intelligence, expanding the versatility of control parameters.
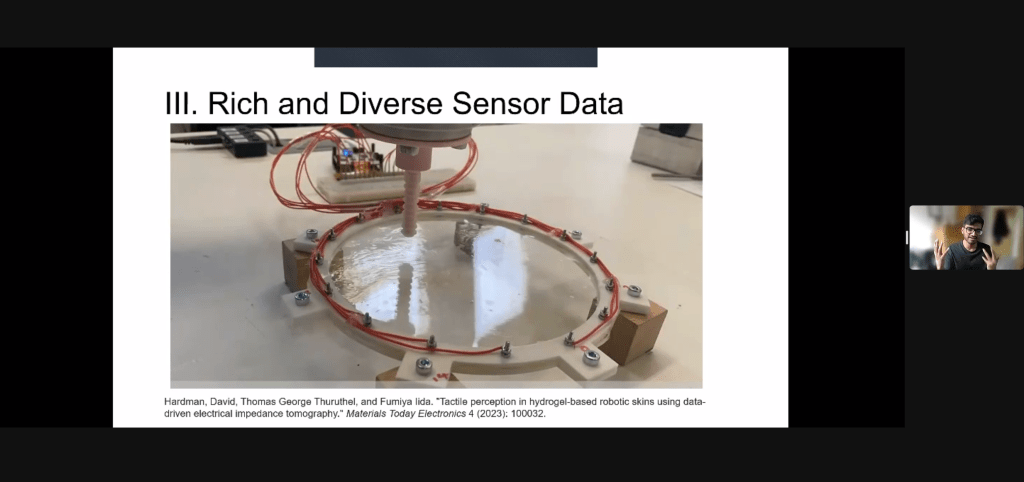
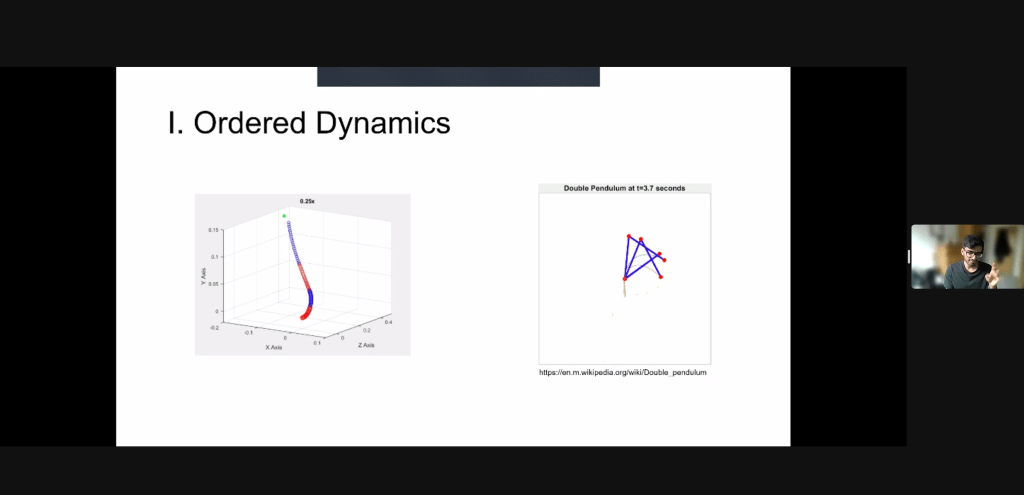
- Thomas George-Thuruthel: ABOUT THE SYNERGY BETWEEN SOFT ROBOTICS AND MACHINE LEARNING
- Abstract: Integration of machine learning into traditional robotics systems is driving advancements in robot capabilities and autonomy. Soft robots typically exhibit more complex and nonlinear dynamics compared to their rigid counterparts, also posing several sensing challenges. Nevertheless, this talk presents the argument that learning-based approaches are even more suited for soft robotic systems, especially when it comes to complex interaction-based tasks. Arguments for this case are supported using observational data from the speaker’s prior work.
- PANEL DISCUSSION
CLICK ON IMAGES TO ENLARGE