23 MARCH 2023
PLEASE NOTE THAT OWING TO COPYRIGHT OR INTELLECTUAL PROPERTY PERMISSIONS WE ARE UNABLE TO SHARE RECORDINGS OF SOME SESSIONS
VIDEO: DAY 1 SUMMARY: Arsen Abdulali (University of Cambridge)
VIDEO: DAY 2 MORNING SESSION SUMMARY: Josie Hughes (EPFL)
VIDEO: DAY 2 CLOSING PANEL DISCUSSION
PLENARY TALKS
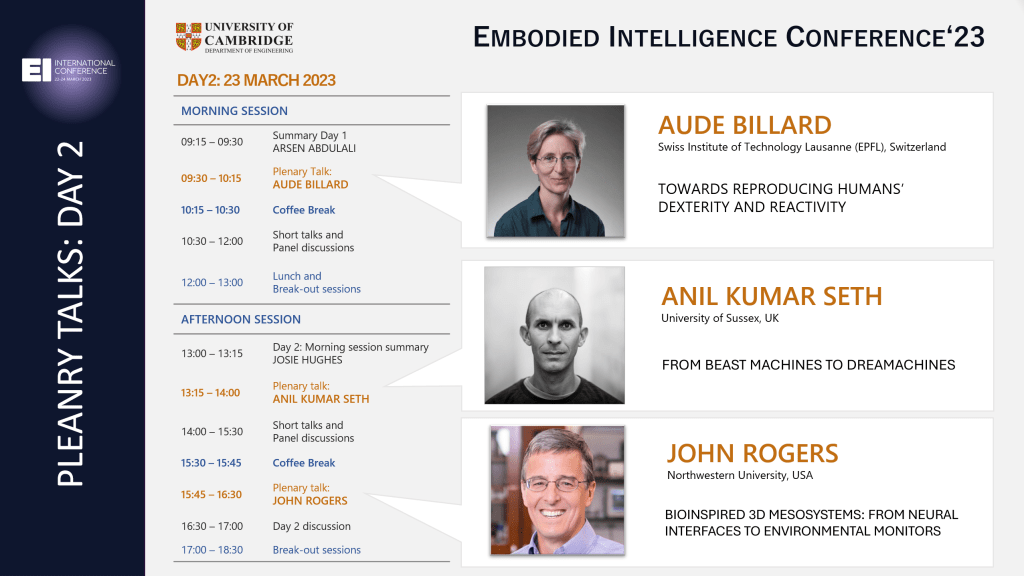
AUDE BILLARD (Swiss Institute of Technology Lausanne (EPFL), Switzerland)
VIDEO: TOWARDS REPRODUCING HUMANS’ DEXTERITY AND REACTIVITY
Abstract: Imagine that as you reach to put your hot cup of coffee on the table, someone comes in the way and you must rapidly avoid the person’s hand while maintaining the cup horizontal to avoid spilling the hot liquid. You would need to react within milliseconds. Chances are high that you will succeed, and find an alternative path that respect the constraints of the task. We posit that our brains manage such rapid re-planning because they store a representation of the feasible space of motion that respect task constraints, and that humans tend to care more about feasibility than optimality when it comes to act fast. This talk will show how we can construct a closed-form representations of feasible set of motions that can be retrieved in real time. This will be illustrated through examples of complex manipulation performed by a humanoid hand, to re-balance an object in hand in the face of a variety of disturbances, such as compensating for external impact, adapting to displacement of the object’s content and avoiding that fingers collide with other fingers.
ANIL SETH (University of Sussex, UK)
VIDEO: FROM BEAST MACHINES TO DREAMACHINES (Unavailable)
Abstract: Consciousness remains one of the central mysteries in science and philosophy. In this talk, I will illustrate how the framework of predictive processing can help bridge from mechanism to phenomenology in the science of consciousness – addressing not the ‘hard problem’, but the ‘real problem’. I will first show how conscious experiences of the world around us can be understood in terms of perceptual predictions, developing an approach some are calling ‘computational (neuro)phenomenology). I’ll then explore how the experience of being an embodied self can be understood in terms of control-oriented predictive (allostatic) regulation of the interior of the body. This implies a deep connection between mind and life: Contrary to the old doctrine of Descartes, we are conscious because we are beast machines. I’ll finish by describing a recent art-science collaboration – the dreamachine – which involves mass stroboscopically-induced visual hallucinations and a large-scale online survey of ‘perceptual diversity’ – The Perception Census.
JOHN ROGERS (Northwestern University, USA)
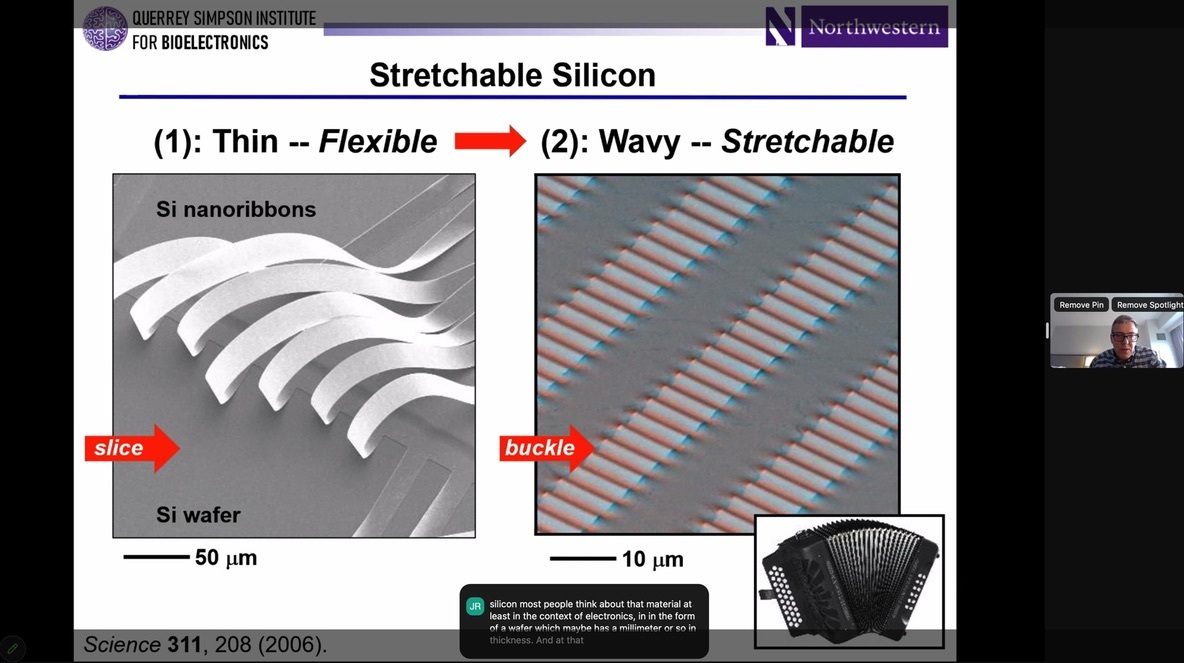
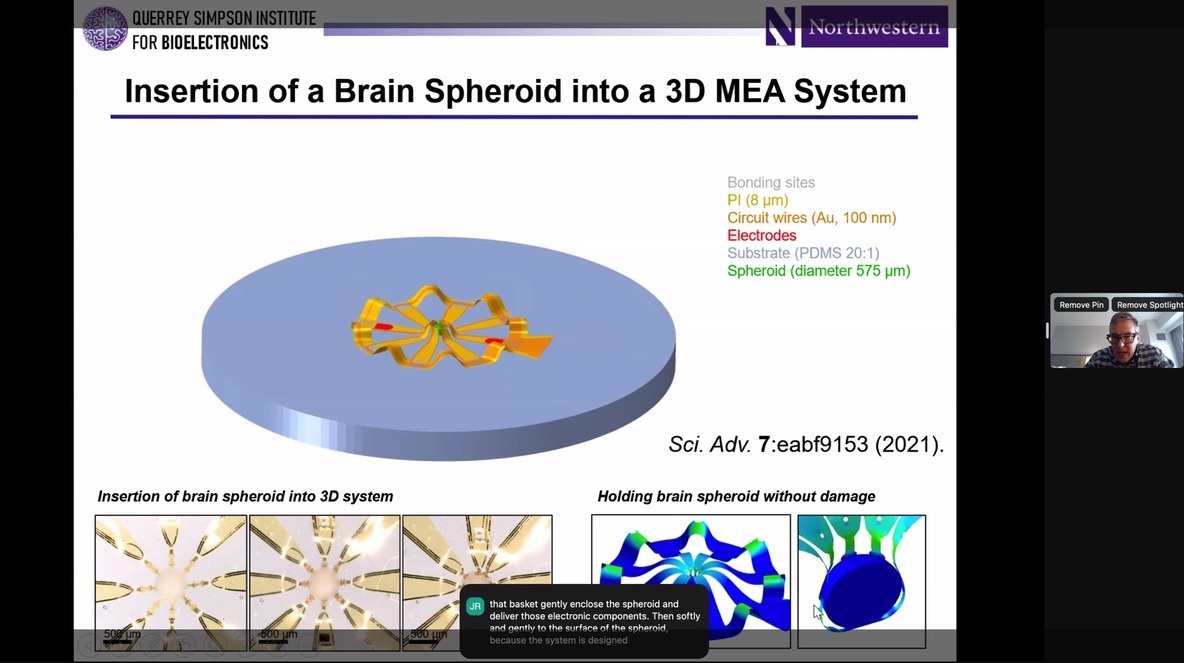
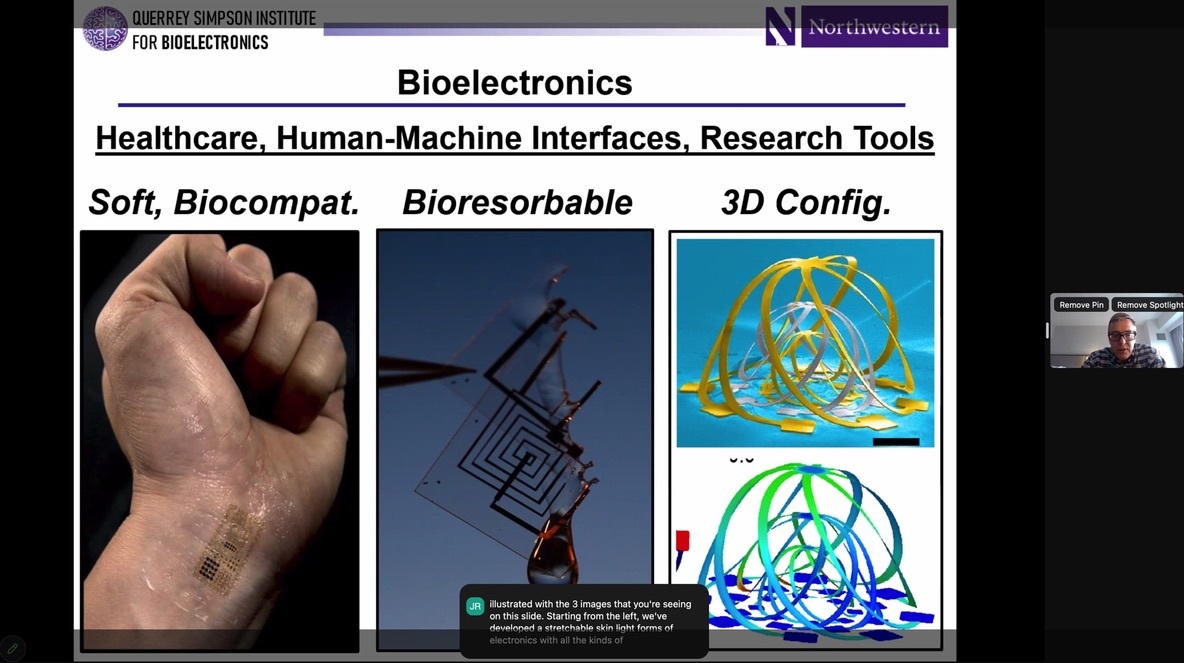
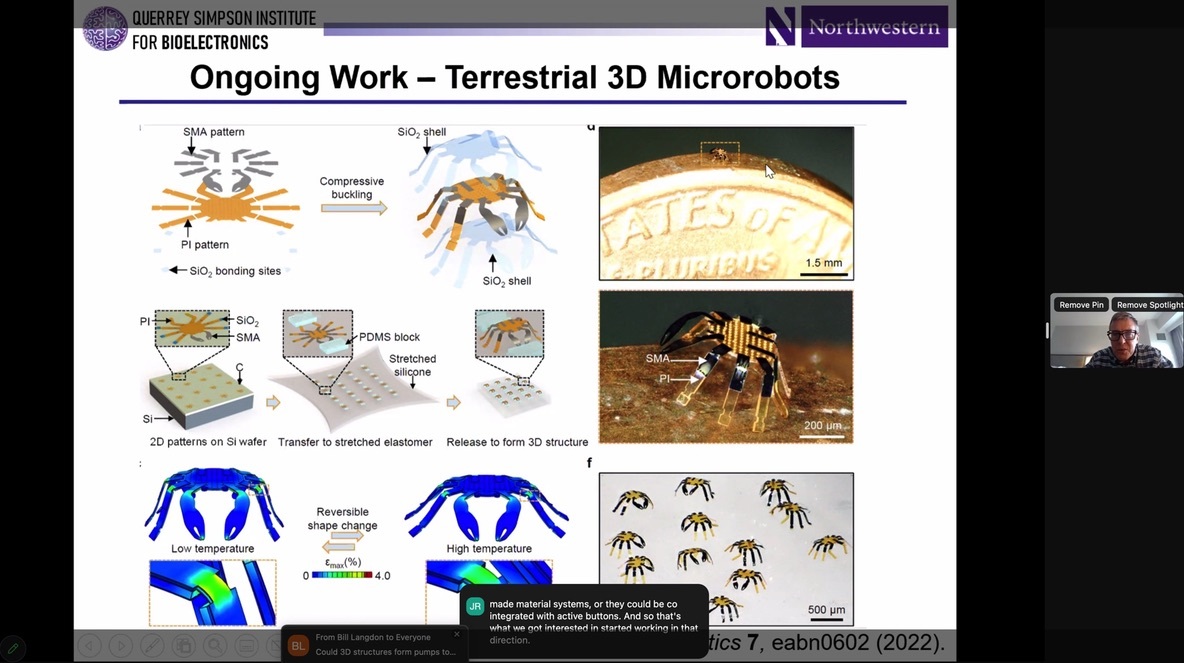
VIDEO: BIOINSPIRED 3D MESOSYSTEMS: FROM NEURAL INTERFACES TO ENVIRONMENTAL MONITORS
Abstract: Complex, three dimensional (3D) micro/nanostructures in biology provide sophisticated, essential functions in even the most basic forms of life. Compelling opportunities exist for analogous 3D structures in man-made devices, but existing design options are highly constrained by comparatively primitive capabilities in fabrication and growth. Recent advances in mechanical engineering and materials science provide broad access to diverse, highly engineered classes of 3D architectures, with characteristic dimensions that range from nanometers to centimeters and areas that span square centimeters or more. The approach relies on geometric transformation of preformed two dimensional (2D) precursor micro/nanostructures and/or devices into extended 3D layouts by controlled processes of substrate-induced compressive buckling, where the bonding configurations, thickness distributions and other parameters control the final configurations. This talk reviews the key concepts and focuses on the most recent developments with example applications in areas ranging from mesoscale microfluidic/electronic networks as neural interfaces, to bio-inspired microfliers as environmental sensing platforms.

MORNING SHORT TALKS (VIDEOS)
- Yong-Lae Park: Robotic Skins with High Stretchability Enabled by Liquid-Embedded Elastomer Sensors
- Abstract: Soft sensors embedded with room-temperature liquid conductors have been extensively studied due to the advantages of high stretchability and electrical conductivity. This talk will go over our recent progresses made in this area over the last decade, in terms of designs, mechanisms, fabrication methods, signal processing, and applications. Examples include multi-modal and multi-functional soft sensors for human-robot interactions, wearable sensing suits for body motion sensing, multi-touch sensor arrays with signal processing, and robotic skin made by advanced manufacturing methods.
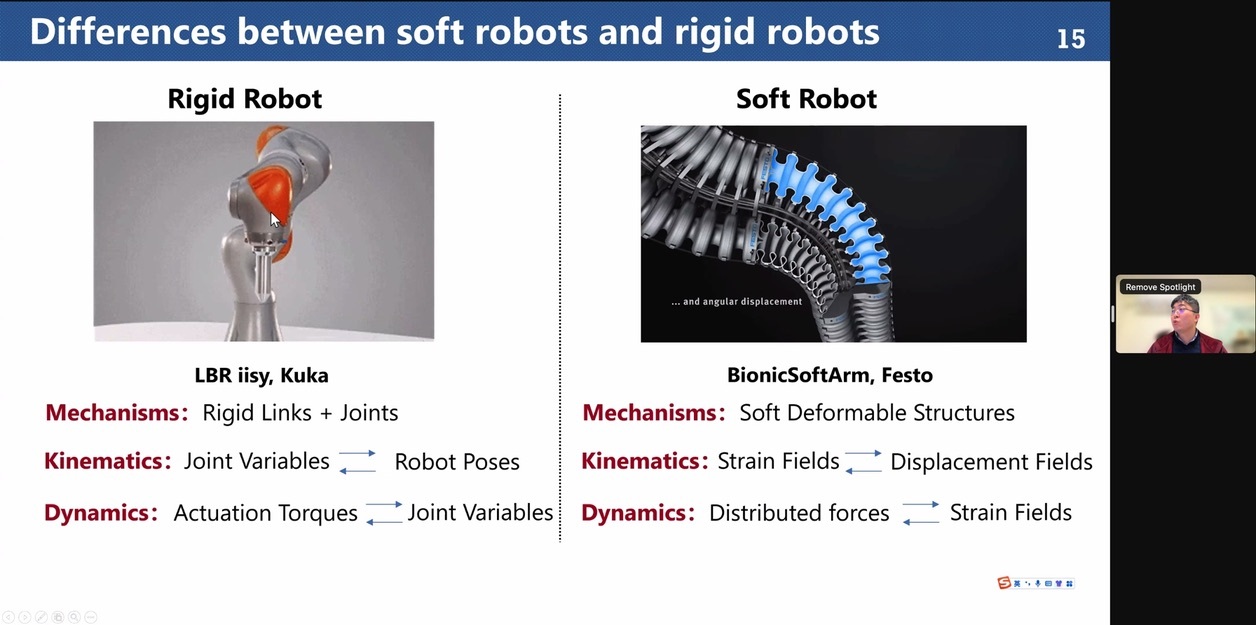
- Guoying Gu: Design and control of soft robotics: prosthetic hand, sensing skin, modeling and control
- Abstract: Conventional robots using rigid structural elements and high-output motors have enabled great progress in automated assembly and manufacturing. An increasing number of robots need to interact safely with humans, manipulate soft and delicate objects or need to move in confined environments. Soft robotics allowing safe interaction with people and environment is a rapidly growing field as the robotic function can be directly created by using the concept of mechanical intelligence in soft materials. However, due to nonlinear large defamation and infinite degree-of-freedom of soft materials and structures, there are grand challenges in design, modeling, control and applications of soft robots. In this talk, I will give an overview of our recent development on design and control of pneumatical-actuated soft robots at SJTU, mainly focusing on soft prosthetic hand, sensing skin, modeling and control approaches. The presented works also demonstrate that the concept of soft robotics is with mechanical intelligence to simplify the design of bioinspired mechanisms and enable new opportunities to bridge the gap between robots and organisms
- Helmut Hauser: Opportunities for Embodied Intelligence and Morphological Computation
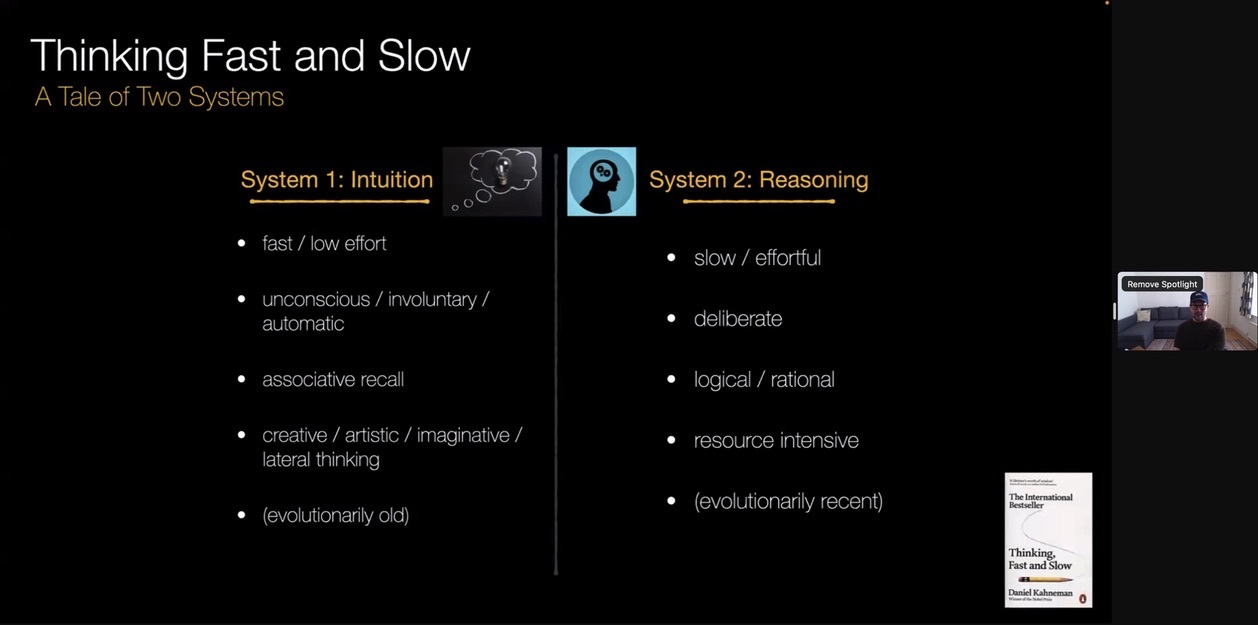
- Ingmar Posner: Robots Thinking Fast and Slow
- Abstract: Recent progress in AI technology has been breathtaking. However, many of the advances have played to the strengths of virtual environments: infinite training data is available, risk-free exploration is possible, acting is essentially free. In contrast, we require our robots to robustly operate in real-time, to learn from a limited amount of data, take mission- and sometimes safety-critical decisions and increasingly even display a knack for creative problem solving. To bridge this gap, we can adopt an alternative view of recent advances in AI. For the first time, roboticists can draw meaningful functional parallels between AI technology and components identified in the cognitive sciences as pivotal to robust operation in the real world: Dual Process Theory and metacognition. In this talk I will contextualise this notion against recent work in robot learning to establish the building blocks of a Dual Process Theory for robots.
- PANEL DISCUSSION
AFTERNOON SHORT TALKS (VIDEOS)
- Josh Bongard: Morphological pre-training
- Abstract: Today’s AI technologies excel because of the massive data they are trained on. Robots of the future could similarly excel if trained on lots of data. …but what data should we train them on? It seems obvious that we should train them on what they see, hear, feel, and so on. After all, this is how humans learn to survive and thrive in the world, right? But humans, and all other animals, grow as they learn to behave. During this growth process, their individual cells experience changes in their neighbors, and migrate through the body in complex ways. Once growth slows or stops, new environments encountered by the organism also exert out-of-distribution stresses on individual cells too. So, perhaps growth—internal change—“pretrains” organisms to weather external changes. I will discuss how future robots may exploit morphological pre-training to enter our work and safely alongside us there.
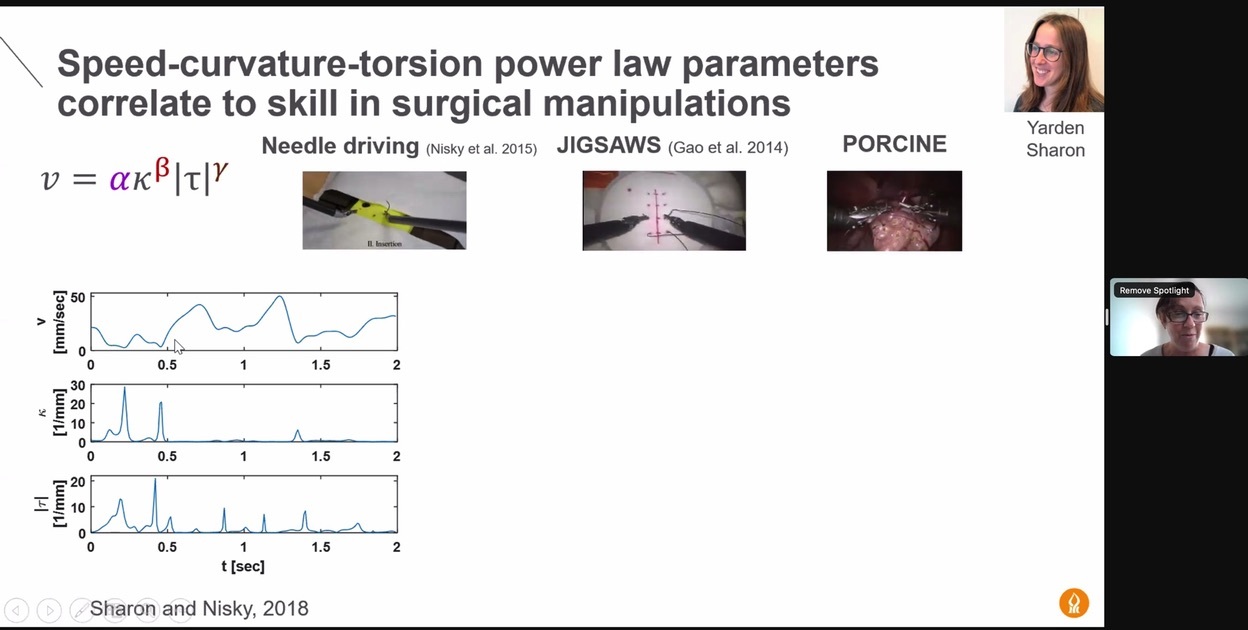
- Ilana Nisky: Towards coevolution of internal representations in robotic-assisted surgery
- John Rieffel: A (brief) history of embodied evolution
- Abstract: In this talk I’ll give a brief overview of the history of evolutionary algorithms embedded in physical systems, from Thompson’s “Silicon Evolution” up through contemporary work. Along the way I’ll talk about the successes of this approach along with the challenges – and will perhaps motivate the need for better soft robotics simulators and hybrid approaches than offer to cross the dreaded “reality gap”.
- Giacomo Indiveri: Spiking neural network chips for real-time behaving systems
- Abstract: In this presentation I will describe the development of mixed-signal spiking neural network VLSI chips, and their application in real-time behaving systems. I will motivate the use of inhomogeneous and noise-sensitive sub-threshold analog circuits by showing analogies between biological and silicon neurons, and I will point out the limitations and advantages of neural processing systems built using these circuits.
- PANEL DISCUSSION
CLICK ON IMAGES TO ENLARGE