21 MARCH 2024
PLEASE NOTE THAT OWING TO COPYRIGHT OR INTELLECTUAL PROPERTY PERMISSIONS WE ARE UNABLE TO SHARE RECORDINGS OF SOME SESSIONS
VIDEO: DAY2 MORNING SESSION chaired by Arsen Abdulali (University of Cambridge, UK)
VIDEO: DAY2 AFTERNOON SESSION 1 chaired by Josie Hughes (EPFL, Switzerland)
VIDEO: DAY 2 AFTERNOON SESSION 2 and CLOSING PANEL DISCUSSION: Josie Hughes (EPFL, Switzerland)
PLENARY TALKS
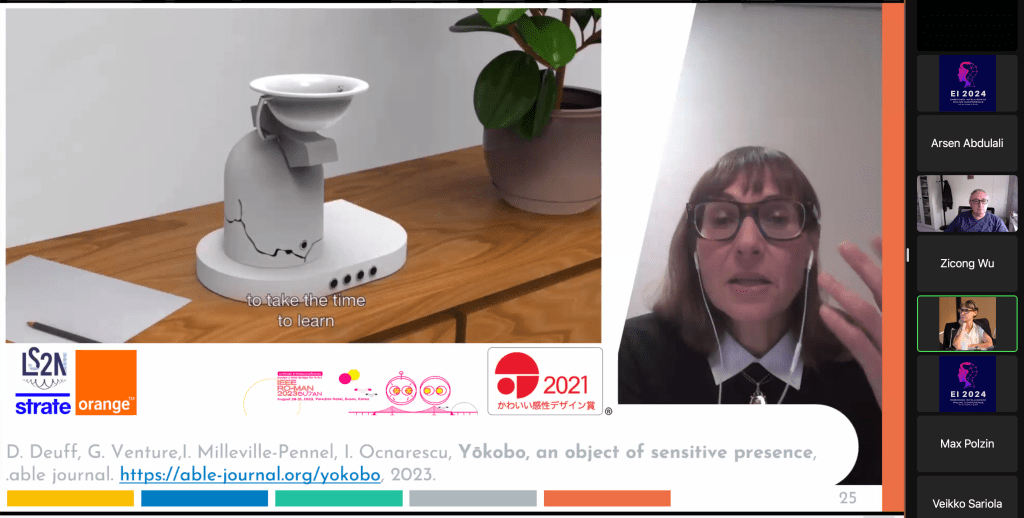
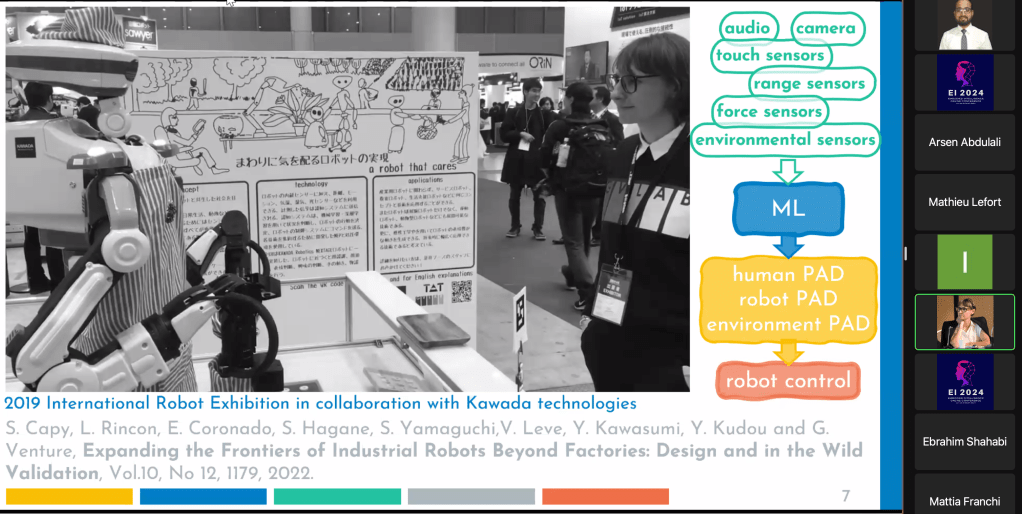
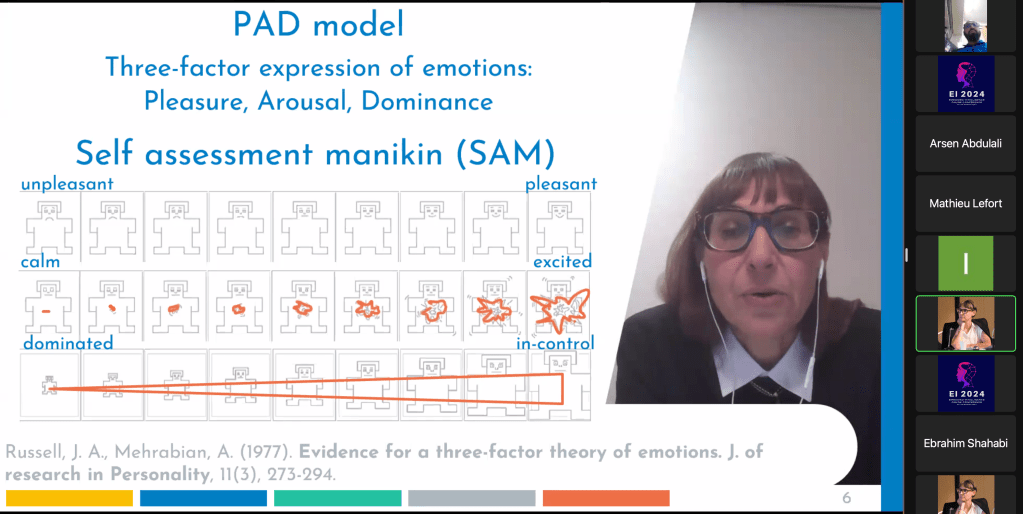
GENTIANE VENTURE ( University of Tokyo, Japan)
VIDEO: ROBOTS AND US: PROBING THE BOUNDARIES OF INTEGRATION
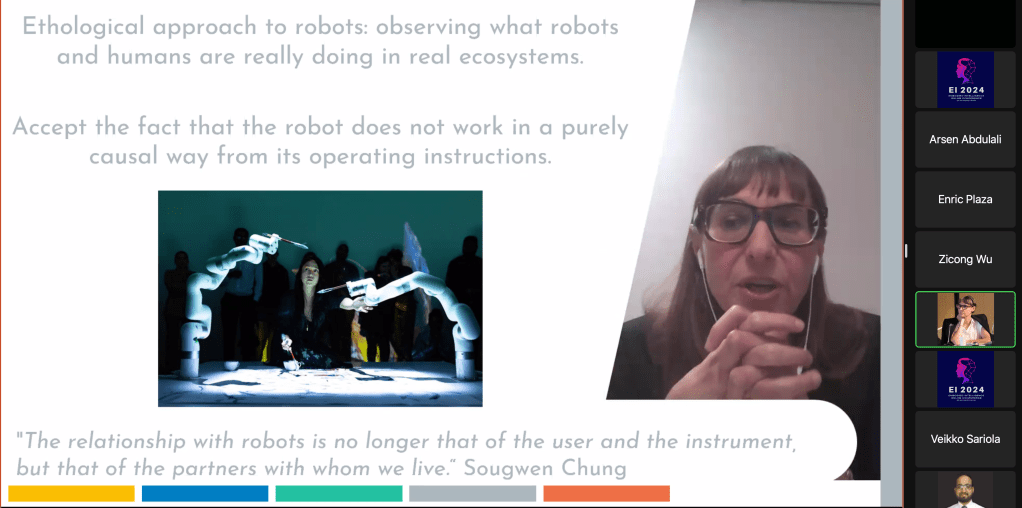
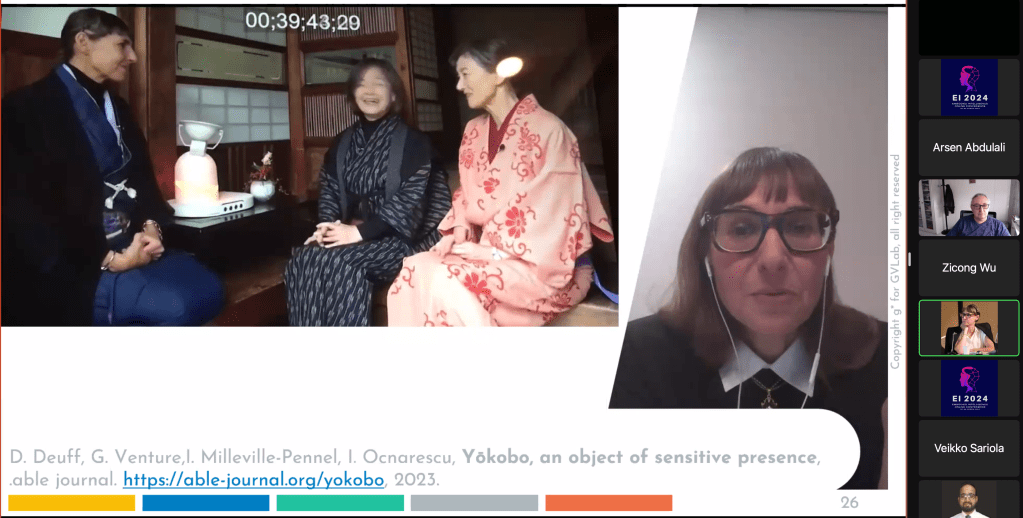
Abstract: In this talk we delve into the intricate relationship between humans and robots, exploring the possibilities, challenges, and implications of their coexistence. Through a transdisciplinary lens, we examine the evolving landscape of robotics, from technological advancements to philosophical considerations. I will take you through the complex terrain of human-robot interaction, shedding light on the ways in which robots could be integrated into various aspects of society. We will explore together the potential for collaboration and synergy between humans and robots, as well as the boundaries and limitations that exist within this dynamic relationship. Drawing upon transdisciplinary perspectives, I will present some of our latest works in expressive robot control, robot design and advocate for the need of in the wild experiments.
BRAD NELSON (EHT Zurich, Switzerland)
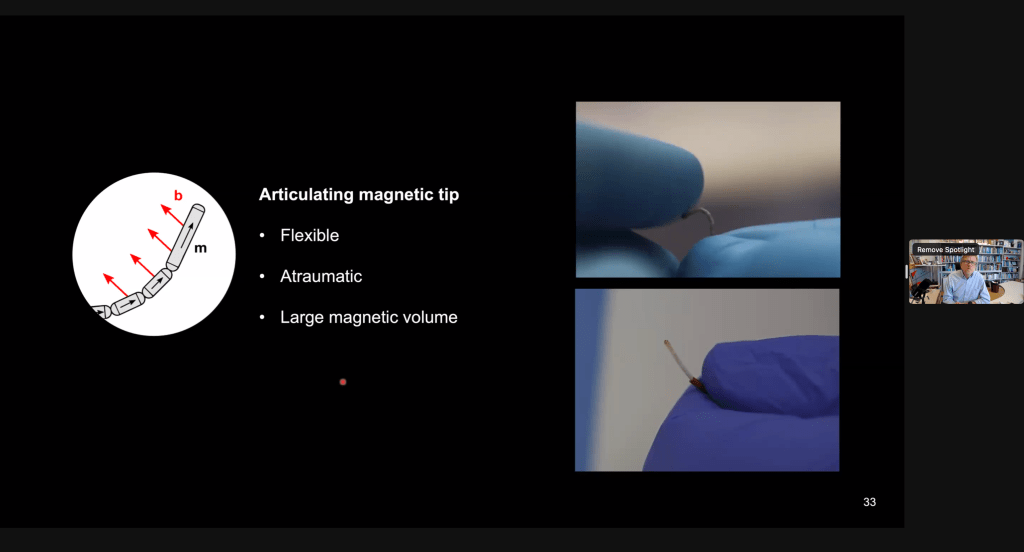
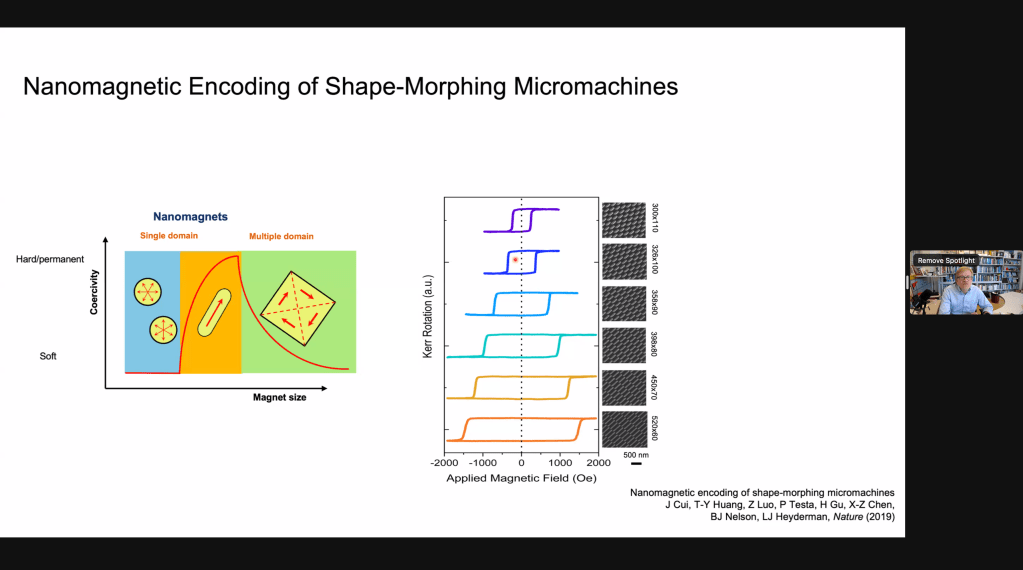
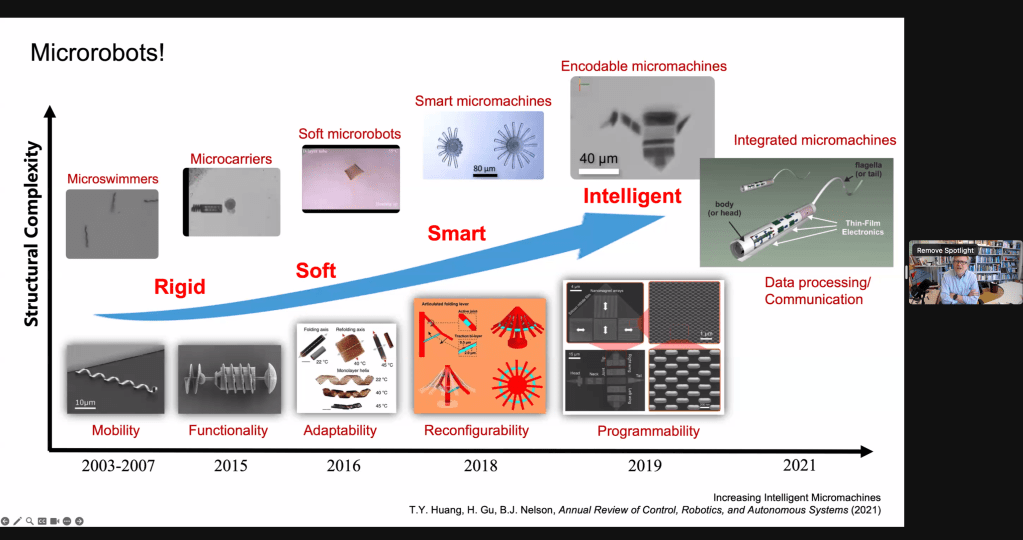
VIDEO: MAGNETIC MICROROBOTS AND THEIR COMING IMPACT ON HEALTHCARE
Abstract: Micro- and nano-robots have made great strides since becoming a focused research topic over two decades ago. Much of the progress has been in material selection, processing, and fabrication, and paths forward in developing clinically relevant biocompatible and biodegradable micro- and nano-robots are becoming clear. Our group, as well as others, maintain that using biocompatible magnetic composites with externally generated magnetic fields and field gradients is perhaps closest to clinical application. One of the most challenging aspects of the field is in the development of the magnetic navigation system (MNS) that generates the fields and field gradients needed for microrobot locomotion. In this talk, I will present an overview of MNSs and show how these systems are fundamentally robotic in the way they must be designed and controlled. Decades of work in robotic manipulation can be brought to bear on this problem as we move forward in bringing MNS technology to the clinic. I will also look at recent efforts in creating more intelligent micro and nano robots that exhibit increasingly complex behaviours, some of which can even be programmed in situ. The field appears to be on the cusp of realizing the fantastic voyage.
JONATHAN HURST (Oregon State University, USA)
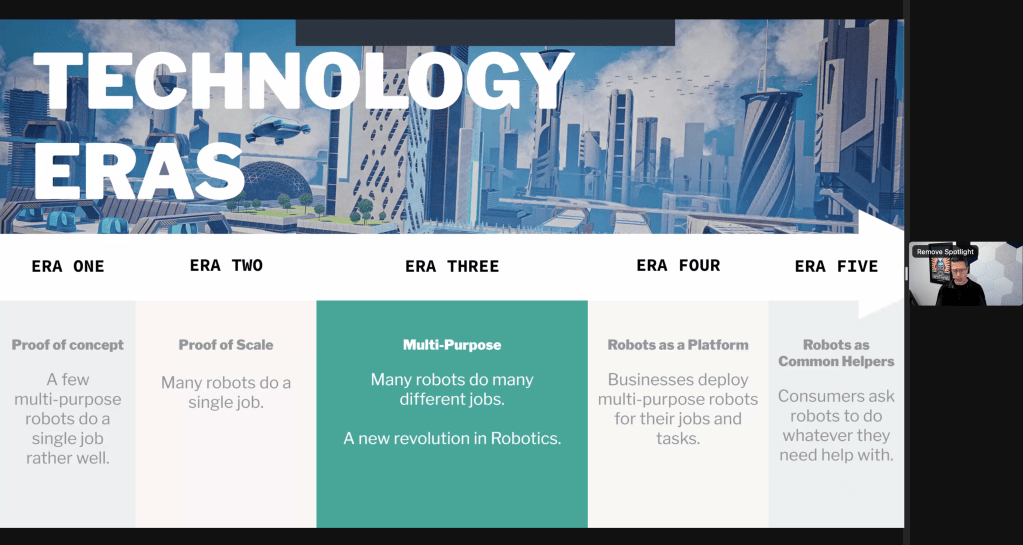
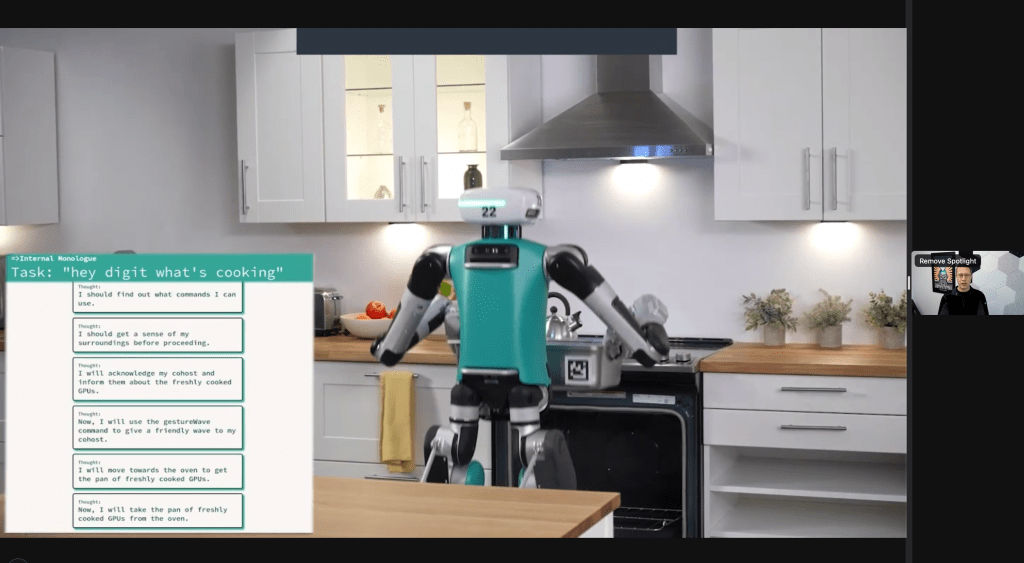
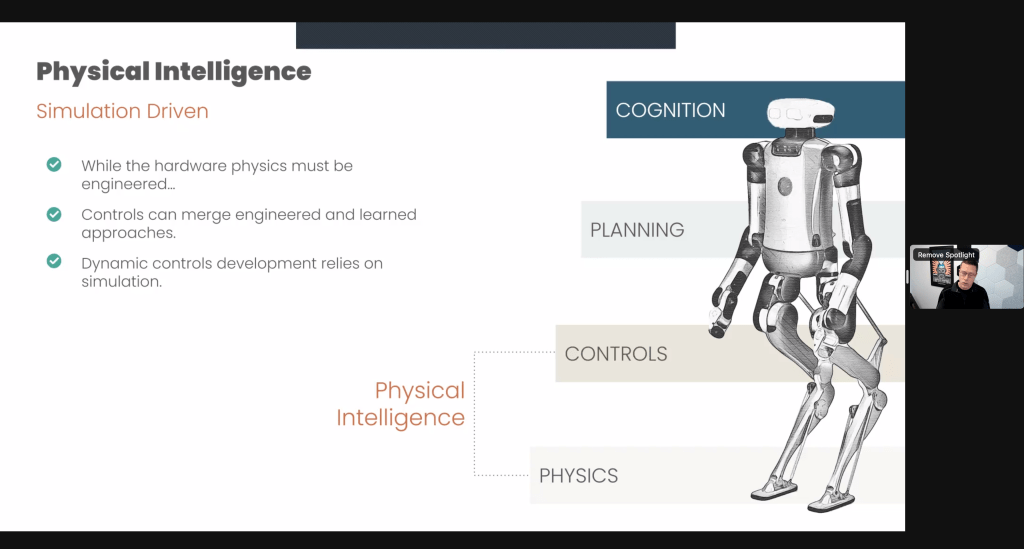
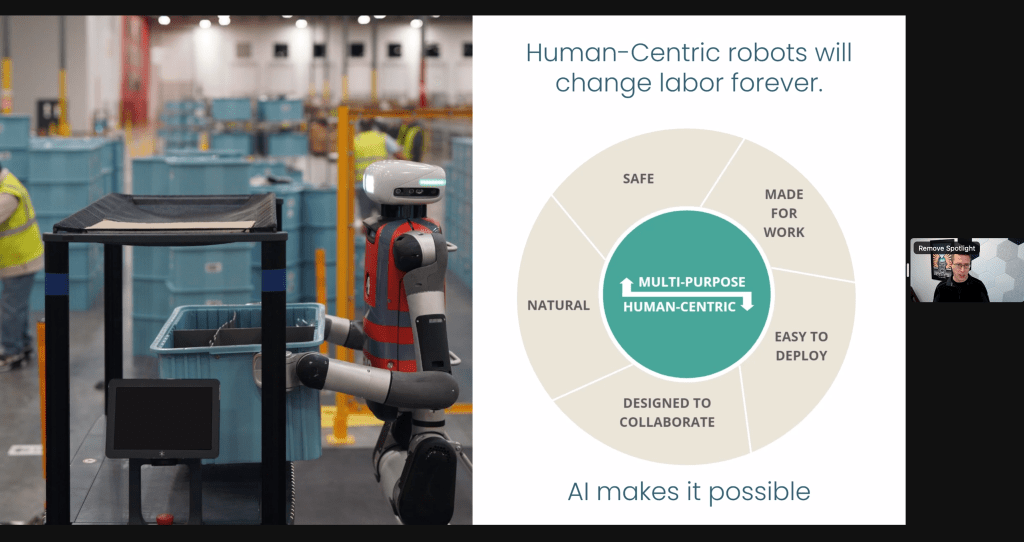
VIDEO: HUMAN-CENTRIC ROBOTS: CREATING EMBODIED AI
Abstract: Up until recently, the highest-performing, best approaches to robot control involved a lot of upfront human work for each and every new skill. Defining environments, building detailed model-based methods for controls, and specifying machine-interpretable steps to complete a task are brittle, time-consuming, iterative processes, for highly skilled engineers. But today, we are participating in a transition to modern AI tools that yield results faster, with higher performance than any prior method. At Agility Robotics, our bipedal human-centric robot, Digit, is learning skills inside a digital twin of real-world customer environments, and beginning to achieve performance that exceeds any prior control approach, with less engineering time invested to learn new skills. By connecting a Large Language Model, Digit can convert natural language high-level requests into complex robot instructions, composing the library of skills together, using human context to achieve real work in the human world. All of this is new – and it is never going back: AI will drive a fast-following robot revolution that is going to change the way we live..
MORNING SHORT TALKS (VIDEOS)
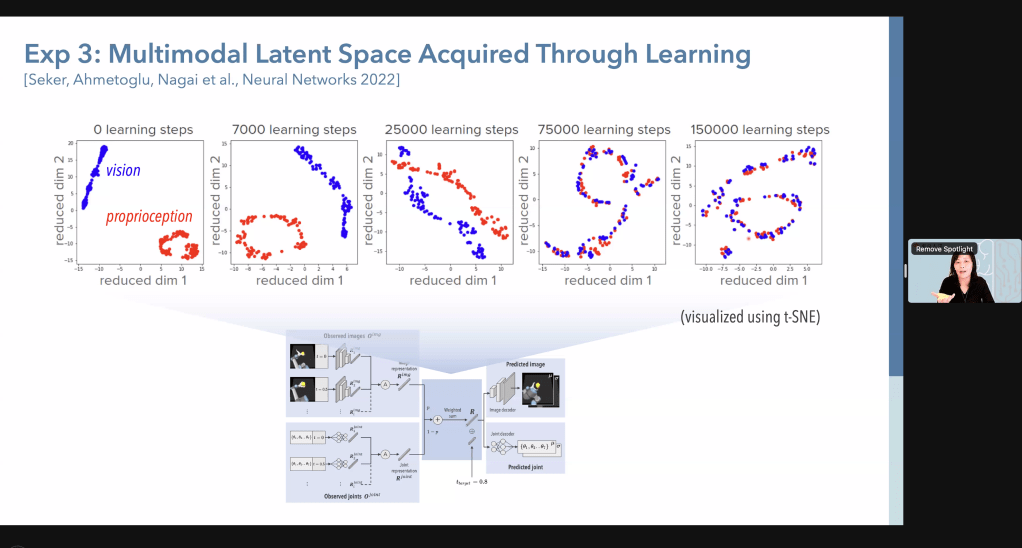
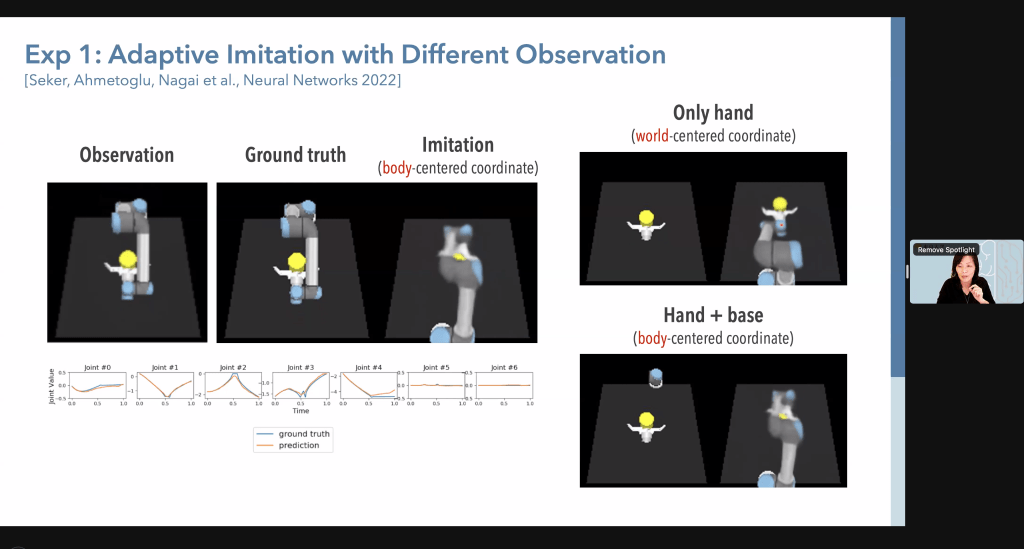
- Yukie Nagai: EMBODIED PREDICTIVE PROCESSING FOR COGNITIVE DEVELOPMENT
- Abstract: The predictive processing theory posits that minimizing prediction errors is a core mechanism of the brain. Our research involves developing computational neural networks for robots, enabling them to learn cognitive functions based on this theory. My talk will demonstrate how embodied predictive processing enables multimodal predictions and thus leads to the development of social cognition.
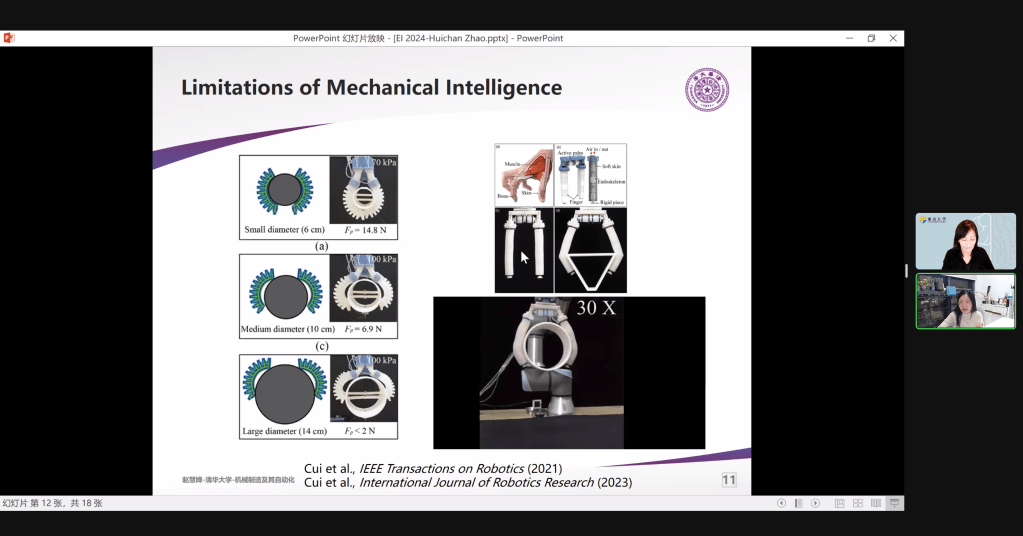
- Huichan Zhao: HIGH POWER DENSITY ARTIFICIAL MUSCLES AND INTEGRATED PROPRIOCEPTIVE SENSORS FOR SOFT ROBOTS
- Abstract: In this talk, I’ll compare the actuation and sensing mechanisms employed in rigid-body-based robots with those utilized in soft continuum robots. I will discuss about the significance of incorporating embedded or integrated artificial muscles and proprioceptive sensors for enhancing embodied intelligence within soft robots. Furthermore, I will outline our recent progress in developing high-power-density artificial muscles and optoelectronic sensors for shape reconstruction and tactile perception. Finally, I will briefly talk about my perspectives regarding the concept of robot “intelligence”.
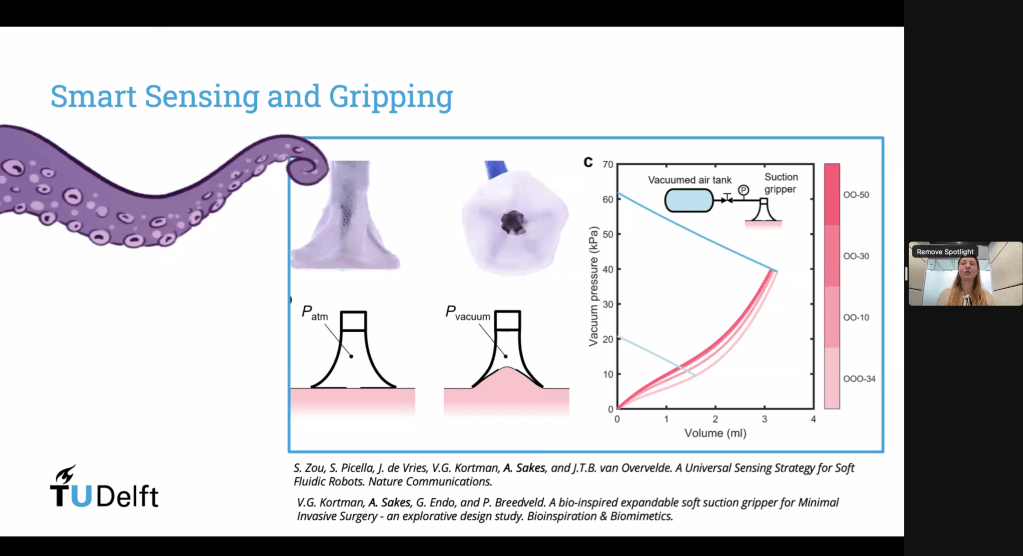
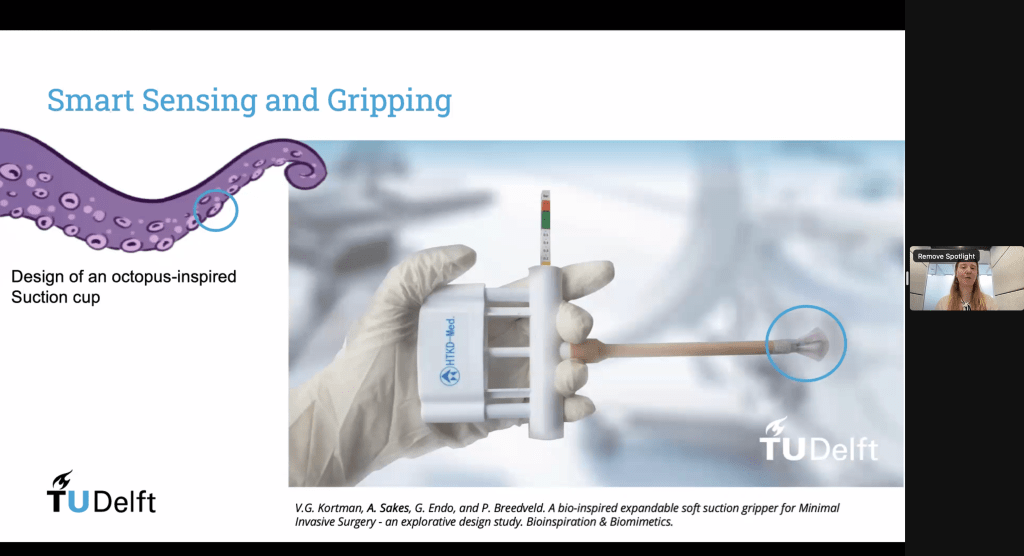
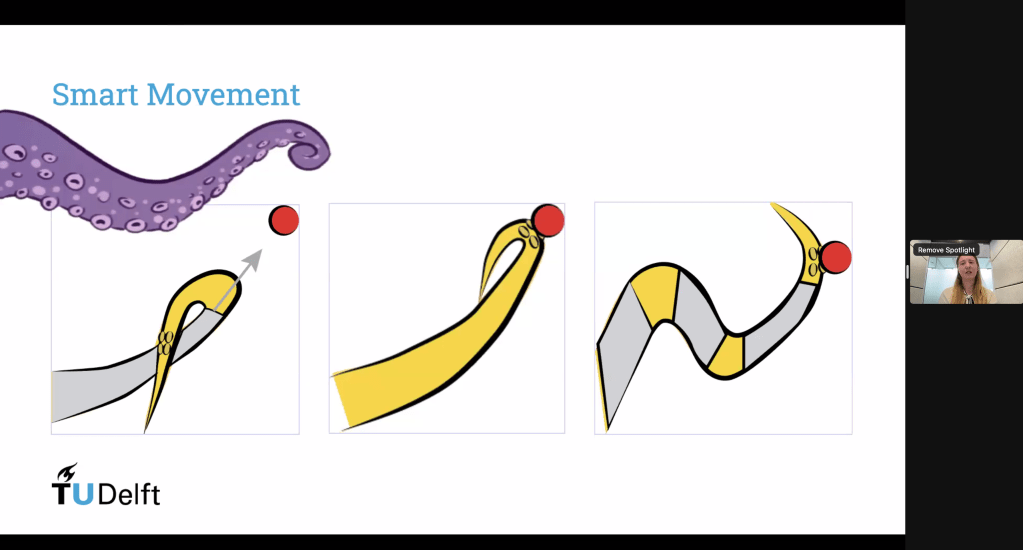
- Aimee Sakes: DESIGNED INTELLIGENCE IN SOFT MEDICAL ROBOTS
- Abstract: This presentation delves into the different layers of intelligence, from artificial to physical intelligence, and how this can be incorporated into the design of medical devices. The focus will be on two developments in our lab: a suction cup with self-sensing capabilities and a catheter with adjustable friction capabilities. These innovations represent a paradigm shift in medical device design, harnessing embodied intelligence to adapt dynamically to the changing conditions of the human body.
- Amy Kyungwon Han: EMBODIED INTELLIGENCE FOR BIMANUAL HANDLING OF DEFORMABLE OBJECTS
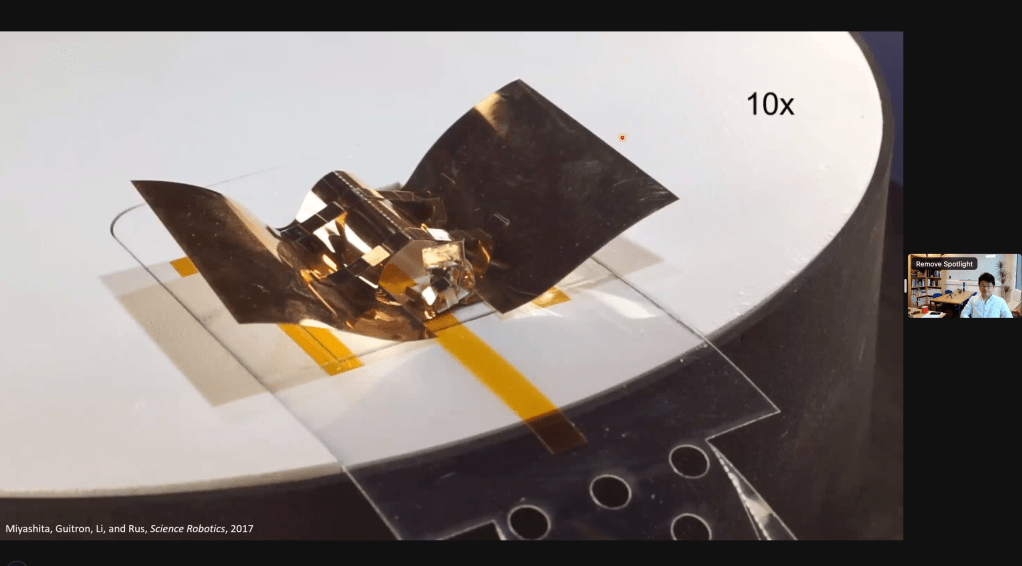
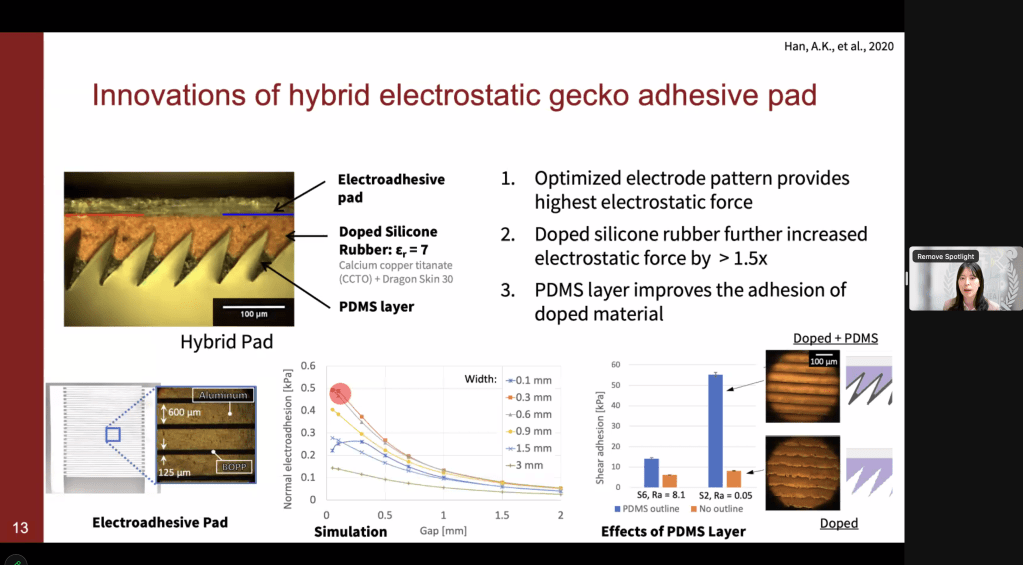
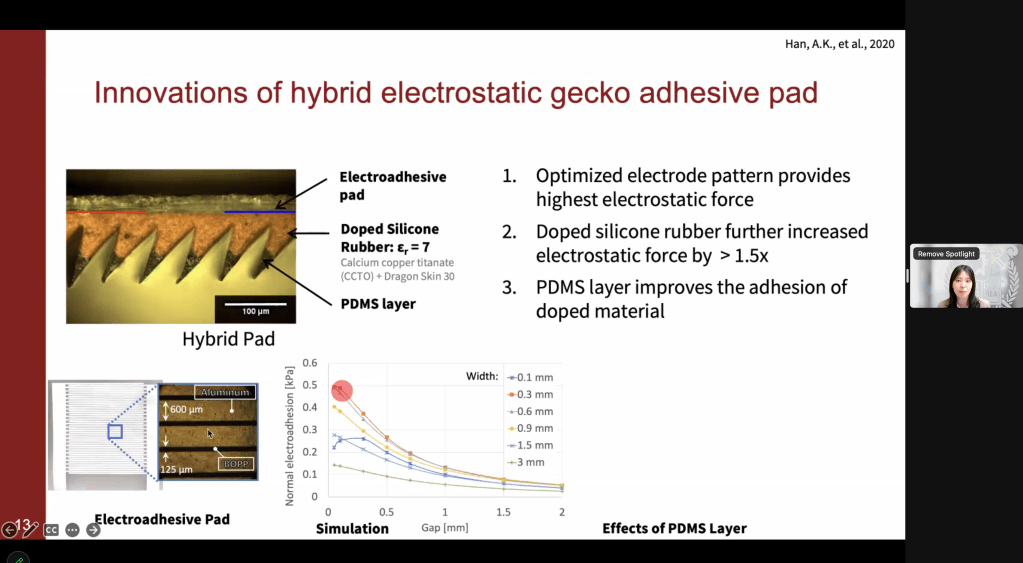
- Abstract: A challenge for bimanual mobile robots in retail and warehouse environments is handling deformable and bulky objects, as they often pick up objects by squeezing them between two arms, relying on Coulomb friction. In this talk, we present hybrid adhesive end-effectors for bimanual handling of deformable objects. The new gripping system combines passive mechanical compliance with a hybrid electrostatic-adhesive pad so that humanoid robots can grasp a wide range of materials with a small gripping force. These grasping forces are more than 10 times smaller than without the hybrid pad. As an application, we demonstrate a humanoid robot handling delicate deformable objects ranging from flowers in a plastic sleeve to a 2.4 kg sack of rice with less than 1.5 N of normal gripping force.
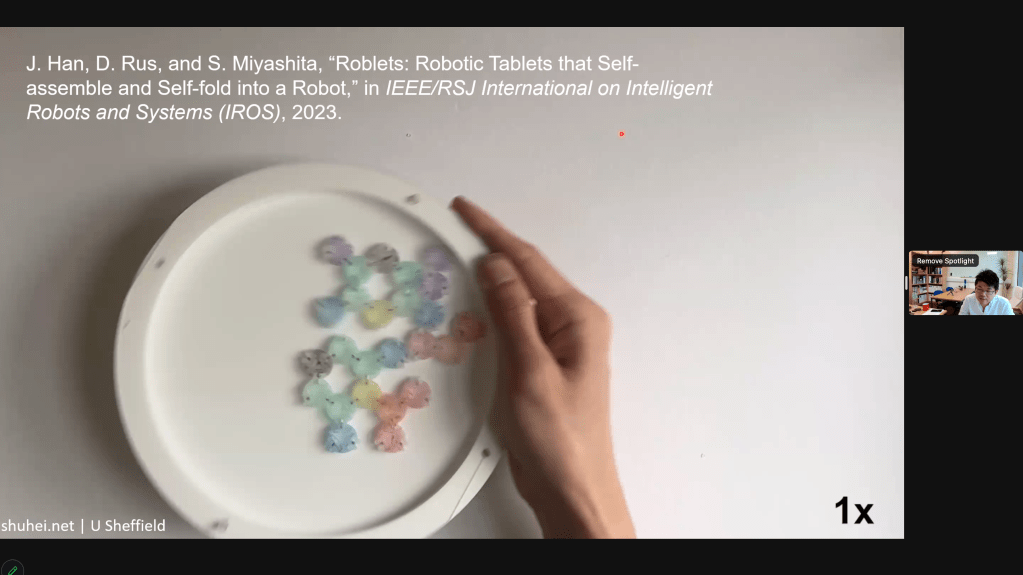
- Shuhei Miyashita: FROM BULK MATERIAL TO SENTIENT LIFE THE ROBOTICS JOURNEY
- Abstract: This talk will discuss the possibility of materials having intelligence and consider how far we can get closer to life.
- PANEL DISCUSSION
AFTERNOON SHORT TALKS (VIDEOS)
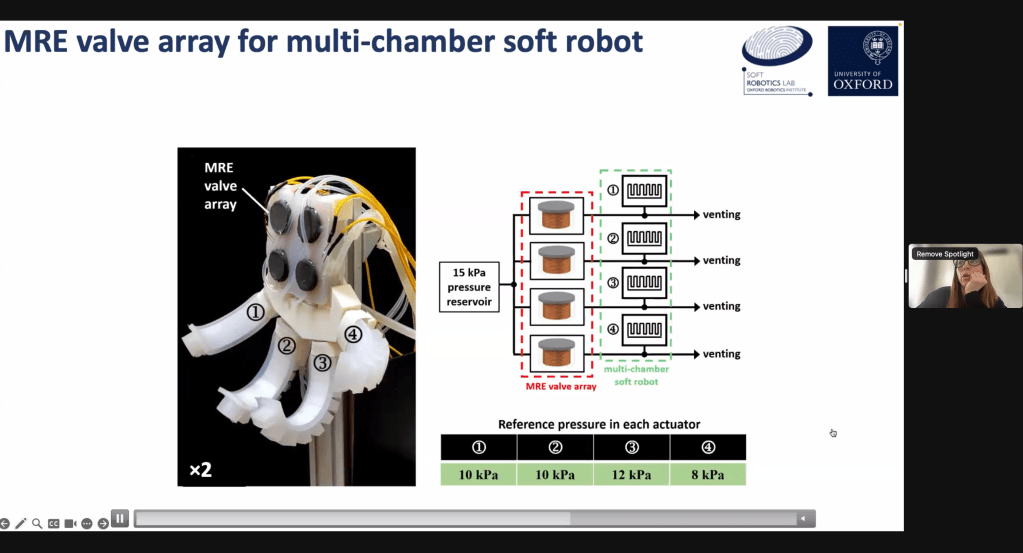
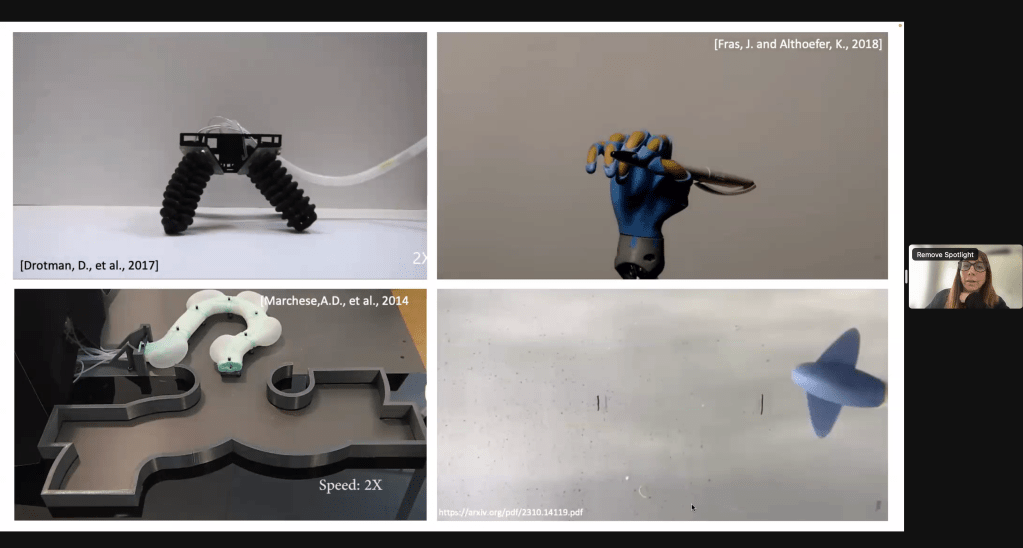
- Perla Maiolino: DESIGNING 3D-PRINTING VALVES FOR CONTROLLING SOFT ROBOTS
- Abstract: Soft pneumatic robots have gained traction thanks to the possibility to exploit their adaptability in several tasks and easy actuation. While recent advancements have introduced electronics-free computational devices for soft robotics, integrating these components into pneumatic circuits remains a formidable challenge. Manual circuit design often leads to inefficiencies such as redundant tubing and unreliable fittings. In this talk, we present the design of 3D printed and proportional valves and an open-source toolbox for automating the design of pneumatic circuits tailored for soft robotic applications. By inputting desired computation functions and space constraints, the toolbox generates 3D-printable files of pneumatic circuits, streamlining fabrication and usage.
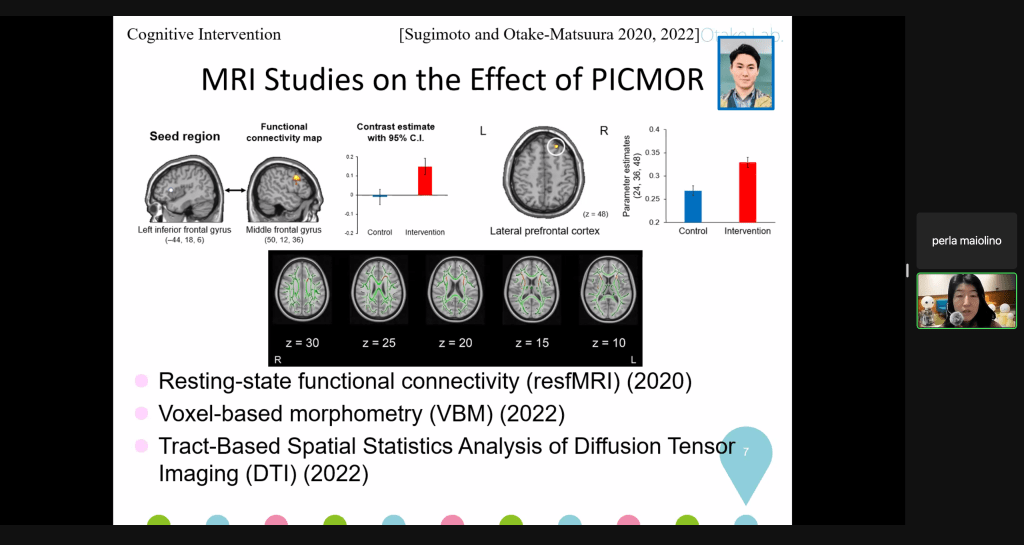
- Mihoko Otake-Matsuura: EMBODIED INTELLIGENCE IN CONVERSATIONS AND ITS APPLICTION TO COGNITIVE INTERVENTION AND PREDICTION
- Abstract: Embodied intelligence is demonstrated in conversation since thoughts and feelings are exchanged through visual, auditory and motor functions. Multiple cognitive functions, such as memory, comprehension, reasoning, and executive functions, are utilized in conjunction with bodily functions. Based on these characteristics of conversation, we are developing technology to intervene in and help maintaining and improving the cognitive functions of older adults through conversation. We present the effects of group conversations among humans using a moderator robot, dialogue with a dialogue robot, and group conversations among humans using a remote conversation system, on human cognitive functions and the cognitive function that can be predicted from conversational features.
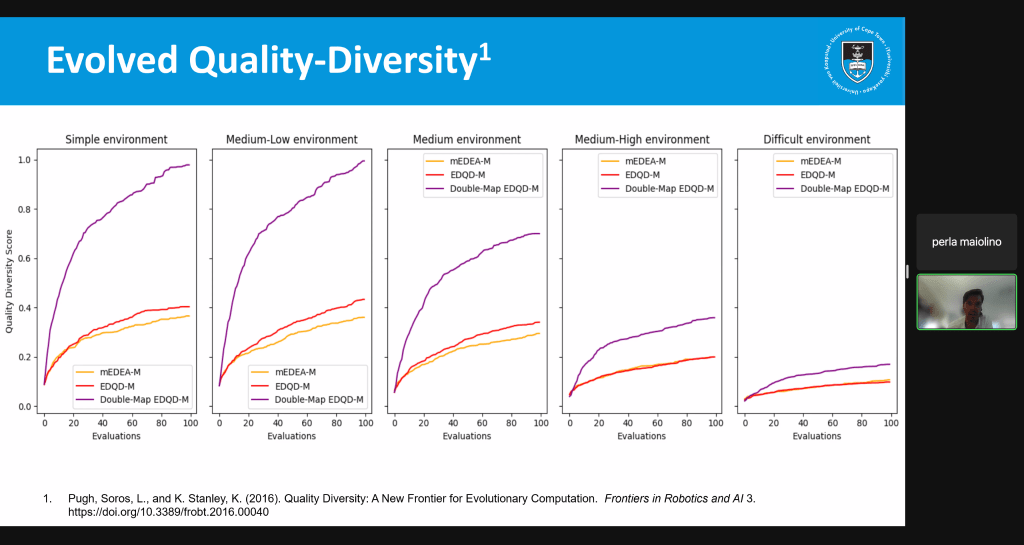
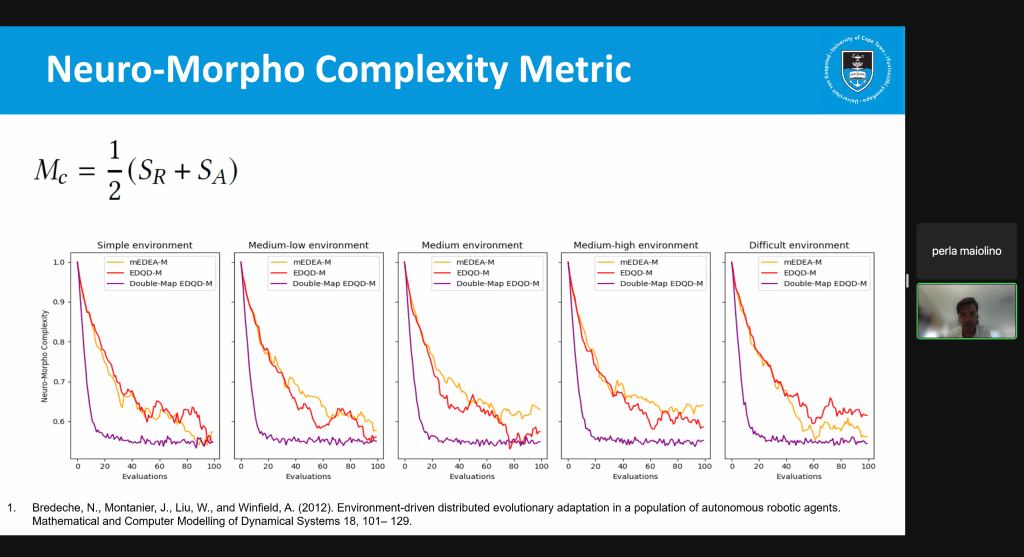
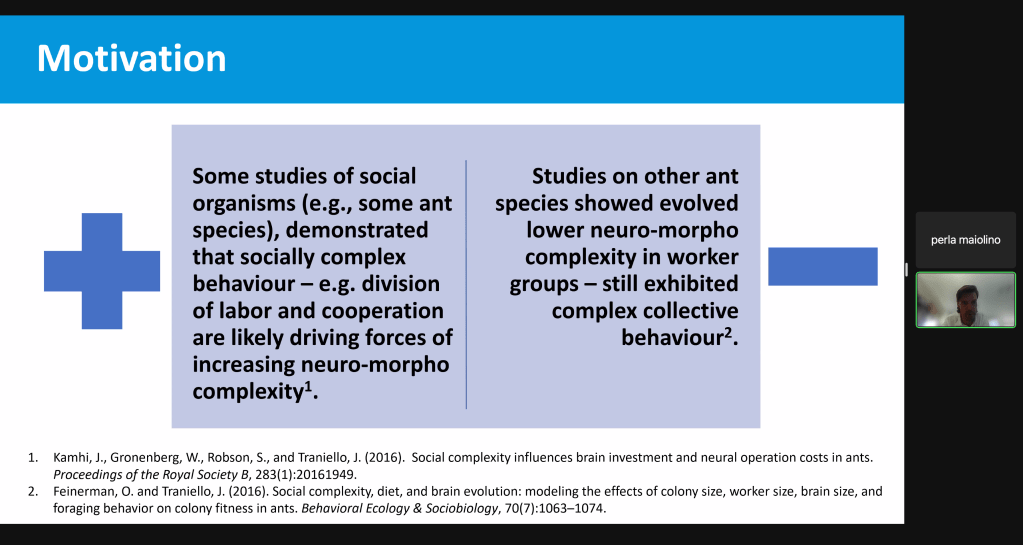
- Geoff Nitschke: COMPLEXITY IN BRAINS AND BODIES
- Abstract: This presentation overviews studies that investigate some environmental and evolutionary conditions under which body and brain complexity evolve, and potential advantages versus disadvantages in artificial systems. The first study, using an evolutionary collective robotics experimental platform, looks at conditions under which neural complexity evolves without sacrificing collective behavioral efficacy. This study evaluates the impact of imposing a fitness cost on evolving increased neural complexity in robot groups that must operate (solve cooperative tasks) in environments of varying complexity. The second study, using a single-robot evolutionary robotics platform, investigates the impact of increasingly complex (locomotive) task environments on the evolution of robot body-brain complexity. Results highlight the benefits of higher body-brain complexity in specific locomotion environments and low level complexity in collective behavior environments.
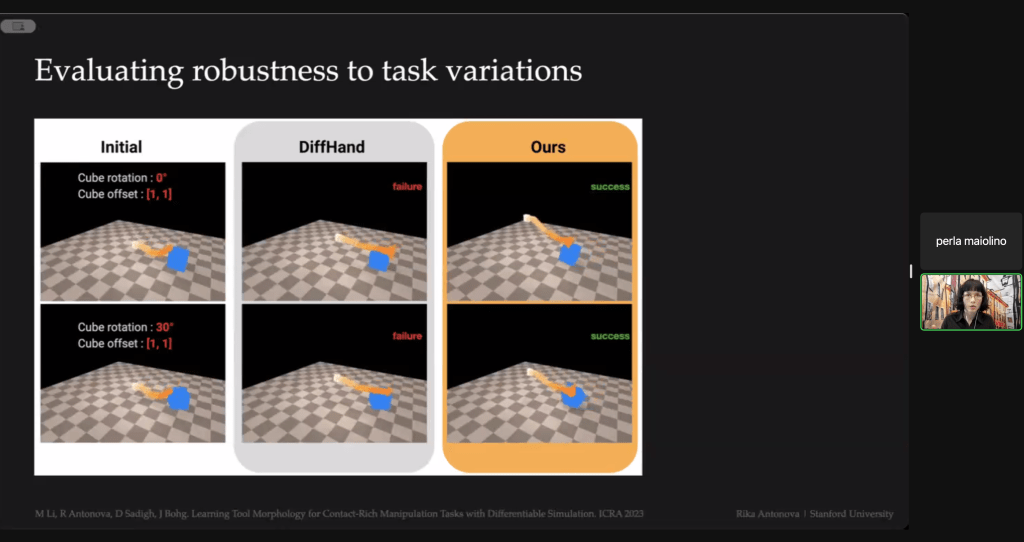
- Rika Antonova: DIFFERENTIABLE SIMULATION: CHALLENGES AND OPPORTUNITIES
- Abstract: Differentiable simulation is a promising toolkit for fast gradient-based policy optimization and for adapting simulators to reality. However, existing approaches to differentiable simulation have focused on scenarios with well-behaved gradients, such as systems with mostly smooth dynamics. This talk will outline the challenges arising with contact-rich interactions, deformables and fluids, where simulators yield rugged optimization landscapes. The talk will discuss an approach that combines global search and local optimization to overcome the above challenges, and also touch upon other interesting directions that benefit from differentiable simulation, such as differentiable rendering and optimizing tool morphologies.
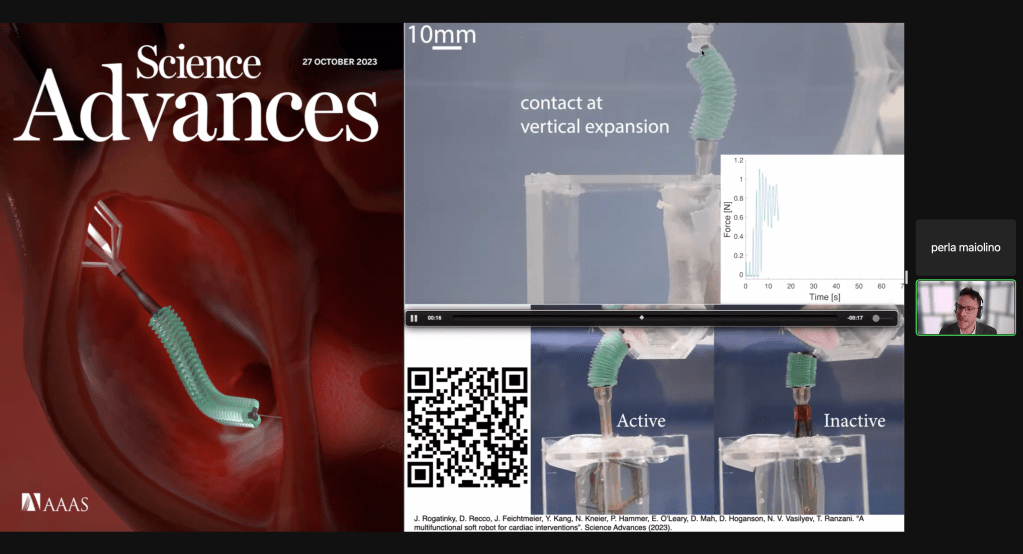
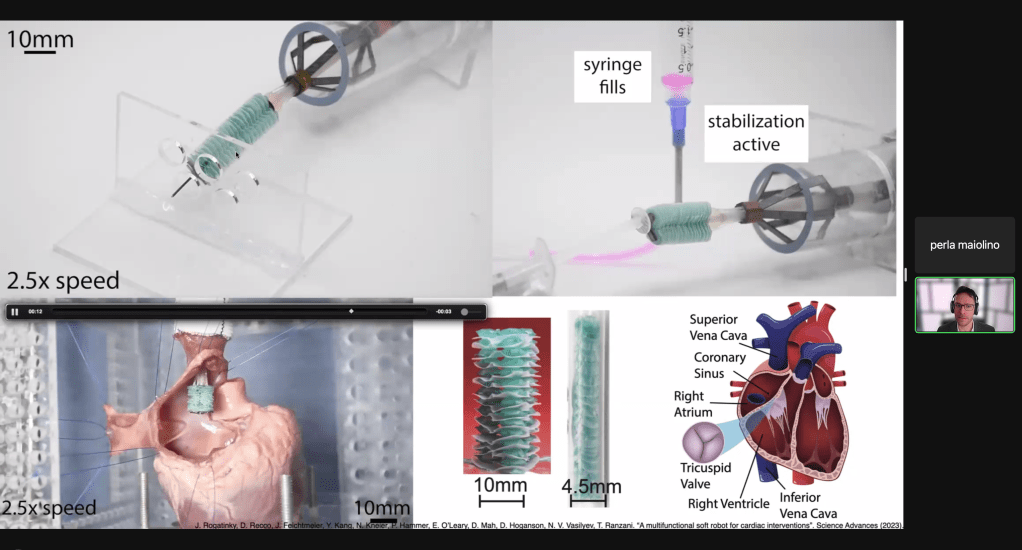
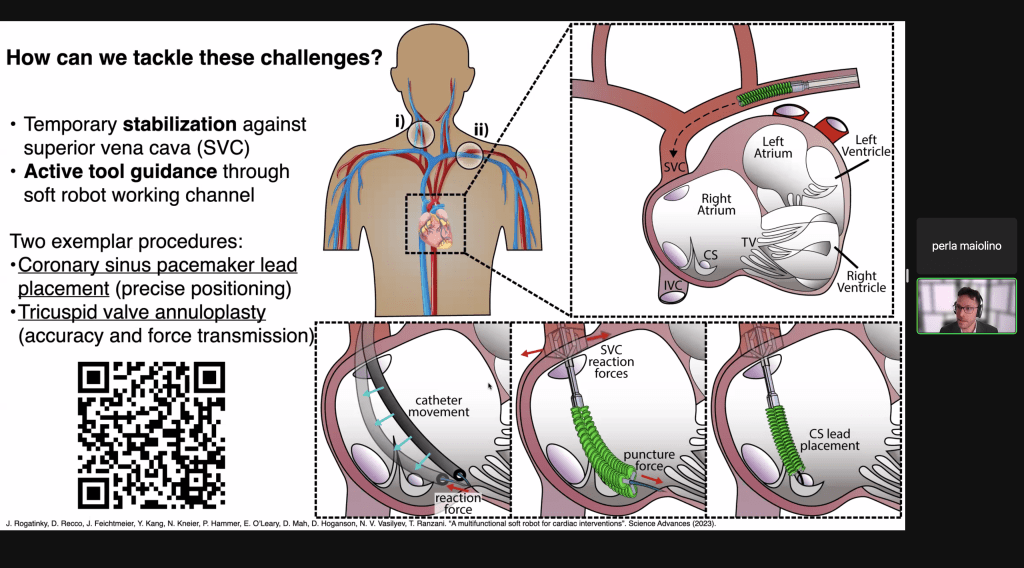
- Tommaso Ranzani: SOFT ROBOTICS FOR INTRAVASCULAR BEATING-HEART APPLICATIONS
- Abstract: The environment inside the beating heart presents a combination of challenges not experienced elsewhere in the body, including scaling issues (i.e., from blood vessels at a few millimeters in diameter to heart chambers at the centimeter scale), a motile environment, and remote tool operation. As such, it can be difficult for interventional tools to maneuver dexterously and apply significant forces from the distal tip of the catheter to an intracardiac target. In this talk, I will present our work on a millimeter-scale soft robotic platform that can deploy and self-stabilize at the entrance of the heart and guide existing interventional tools toward a target site. In exemplar intracardiac procedures inside the right atrium of the heart, we demonstrate the ability of the collapsible constituent mechanisms to provide enough dexterity to reach any target in the right atrium, enough stability to maintain constant contact on highly motile anatomy, and enough mechanical leverage to generate newton-level forces.
- PANEL DISCUSSION
CLICK ON IMAGES TO ENLARGE