PRESENTATIONS
DAY 1: 22 MARCH 2023
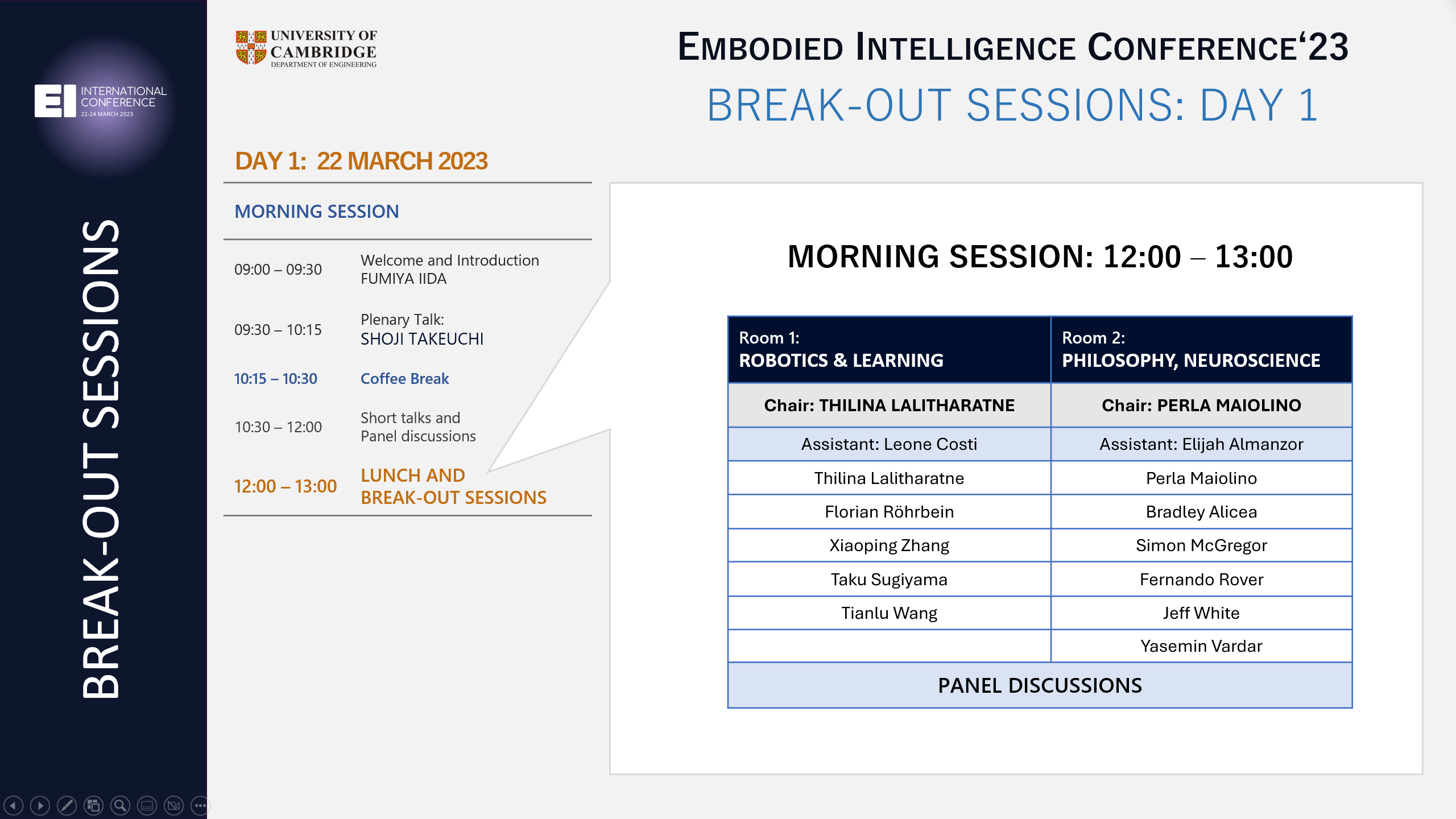
ROOM 1: ROBOTICS & LEARNING
| Thilina Lalitharatne | Chair’s Introduction & Talk |
| Florian Röhrbein | Trends in Neurorobotics |
| Xiaoping Zhang | Maze Robot Autonomous Navigation Algorithm with Curiosity and inference Mechanism |
| Taku Sugiyama | Learning Control of Pressure-driven Soft Actuators for Pneumatic and Hydraulic Dual Actuation |
| Tianlu Wang | Leverage mobile magnetic soft robots for the intervention of distal vasculature |
ROOM 2: PHILOSOPHY & NEUROSCIENCE
| Perla Maiolino | Chair’s Introduction & Talk |
| Bradly Alicea | Critical Periods and Developmental Neurosimulation |
| Simon McGregor | Is Chat-GPT Really Disembodied? |
| Fernando Rover | About artificial time experience |
| Jeff White | Augustine and developmental correlates of an artificial soul; a special role for spindle neurons |
| Yasemin Vardar | Learning to Feel Textures: Predicting Perceptual Similarities from Unconstrained Finger-Surface Interactions |

ROOM 1: SOFT ROBOTICS & CONTROL
| Thomas Thuruthel | Chair’s Introduction & Talk |
| Oliver Brock | Control for Embodied Intelligence |
| Kai Junge | Physical twins and reality emulation |
| Elijah Almanzor | Beyond Model-Based Control: From Reflexes to Coordinated Behaviour |
| Francesco Stella | Embodied Intelligence as the driver of early stage evolution |
| Mahdi Haghshenas-Jaryani | Exploiting Morphology of an Underactuated Two-segment Soft-bodied Arm for Swing-up Control |
| Maximilian Stölzle | Learning 3D shape proprioception for continuum soft robots with multiple magnetic sensors |
ROOM 2: ROBOTICS & LEARNING
| Erin Nolan | Chair’s Introduction & Talk |
| Huijiang Wang | Pattern transition, piano playing and embodied intelligence |
| Malte Schilling | Learning of Decentralized Controller for Locomotion in Legged Robots – Implicit and Explicit Communication for Coordination |
| Michael Dickey | Soft Materials Tactile Logic |
| Yoav Matia | Harnessing Nonuniform Pressure Distributions in Soft Robotic Actuators |
| Leone Costi | Remote palpation: a tail of two interfaces |
| Andre Farinha | Unmanned Aerial-Aquatic Vehicles for endurance sailing: structural reconfiguration and applications |
DAY 2: 23 MARCH 2023
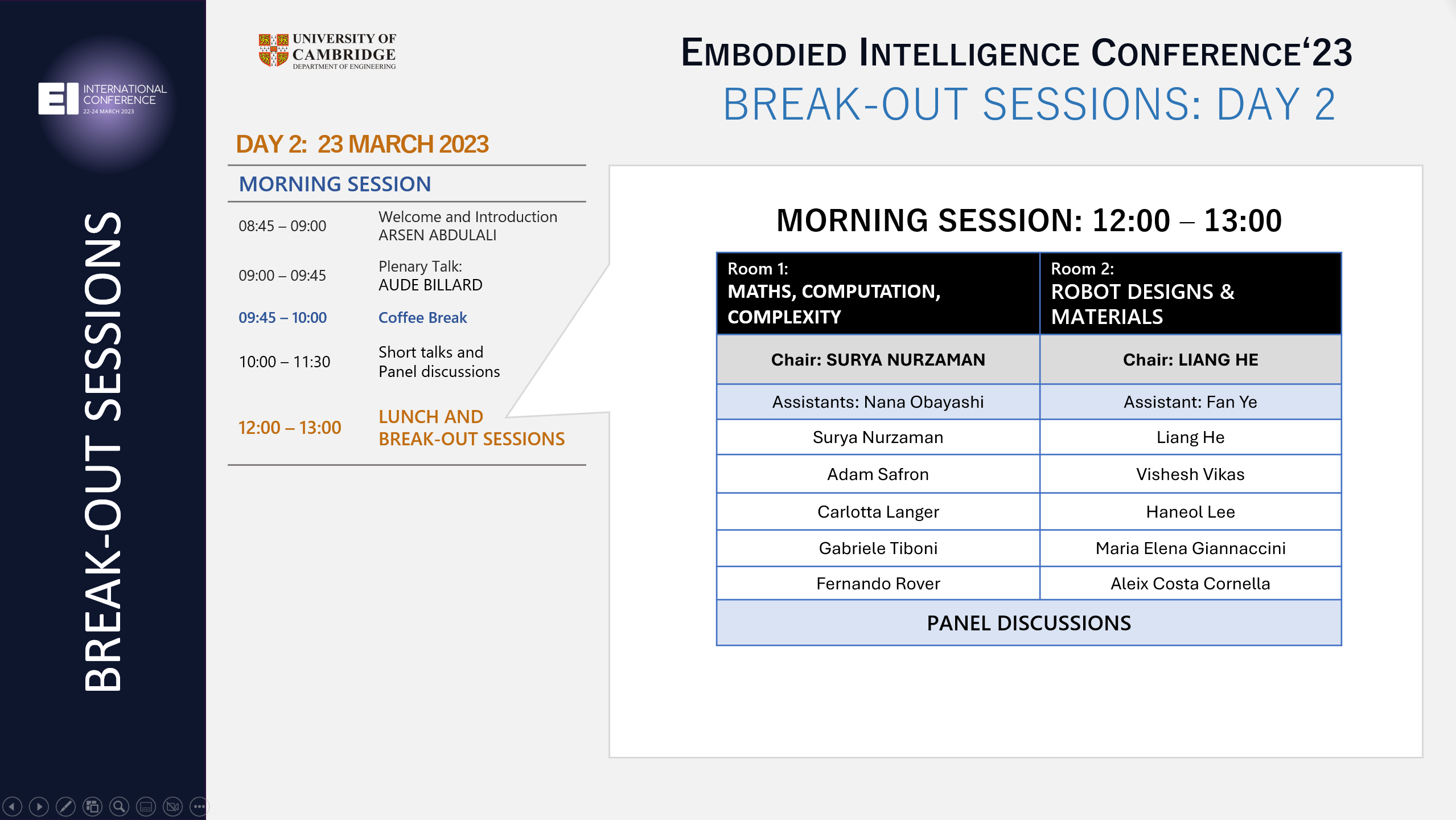
ROOM 1: MATHS, COMPUTATION & COMPLEXITY
| Surya Nurzaman | Chair’s Introduction & Talk |
| Adam Safron | Lived body-worlds and the physical/computational substrates of consciousness |
| Carlotta Langer | The interplay between Morphological Computation and controller complexity |
| Gabriele Tiboni | Domain Randomization for Robust, Affordable and Effective Closed-loop Control of Soft Robots |
| Fernando Rover | About Artificial Temporality |
ROOM 2: ROBOT DESIGNS & MATERIALS
| Liang He | Chairs Introduction & Talk |
| Vishesh Vikas | SoRo Transformers : Spherically Reconfigurable Soft Robots |
| Haneol Lee | Harnessing the nonlinear properties and snapthrough behavior of buckling inflatable tubes for robotic applications |
| Maria Elena Giannaccini | Soft, Variable Stiffness Actuators for Effective Robot Design |
| Aleix Costa Cornella | The material is the machine: New materials for embodied intelligence in soft robotics |
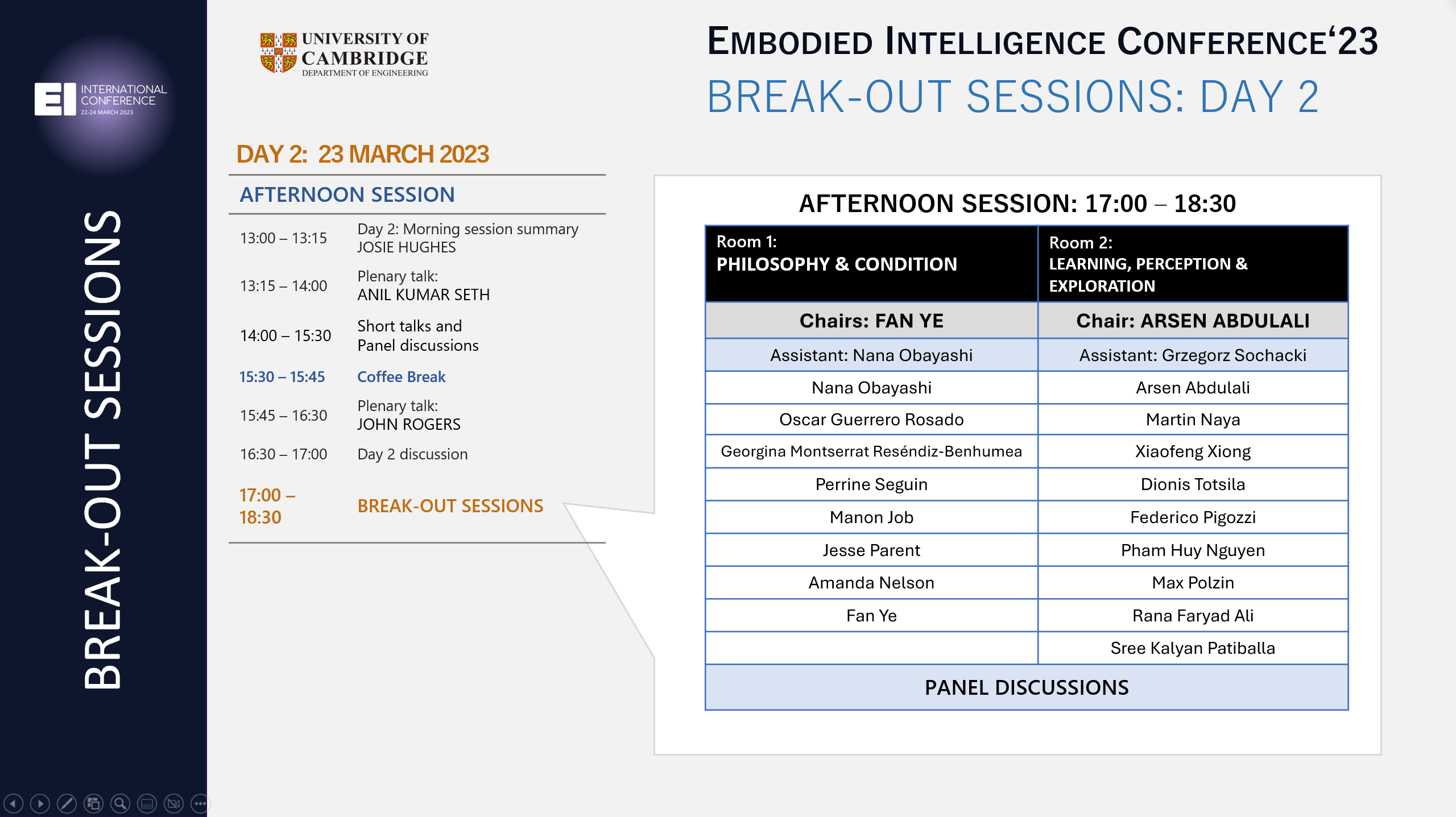
ROOM 1: PHYLOSOPHY AND CONDITION
| Fan Ye/Nana Obayashi | Chair’s Introduction & Talk |
| Oscar Guerrero Rosado | Maslow’s hierarchy through the lens of evolution |
| Georgina Montserrat Reséndiz-Benhumea | An Introduction to Embodied Dyadic Interaction Models: A 4E Cognition Investigation |
| Perrine Seguin | Locked-in syndrome, eyes and laws for embodied cognition? |
| Manon Job | Embodied normativity: self-models and social constraints |
| Jesse Parent | A View From 2023: Developing a Survey Methods & Philosophy for Embodied Cognition |
| Amanda Nelson | Embodied Neurophenomenology |
| Fan Ye | Falling Paper Research: Boundary of Order and Chaos |
| Nana Obayashi | More falling paper! New way to answer science questions |
ROOM 2: LEARNING, PERCEPTION & EXPLORATION
| Arsen Abdulali | Chair’s Introduction & Talk |
| Martin Naya | The development of morphology to facilitate learning |
| Xiaofeng Xiong | Embodiment can do more: an integrative view of physical interaction control intelligence |
| Dionis Totsila | Sensorimotor Learning with Stability Guarantees via Autonomous Neural Dynamic Policies |
| Federico Pigozzi | Morphology Choice Affects the Evolution of Affordance Detection in Robots |
| Pham Huy Nguyen | Embodied Intelligence in Reconfigurable Tree-Hugging Robots |
| Max Polzin | Exploiting Embodiment for Exploration in Extreme Environments |
| Rana Faryad Ali | Enabling Vision for Nano- and Micro-Robots: Designing Next-Gen Materials for Photoacoustic Imaging |
| Sree Kalyan Patiballa | Embodied Intelligence in Inflatables through discrete strain limiters |
DAY 3: 24 MARCH 2023
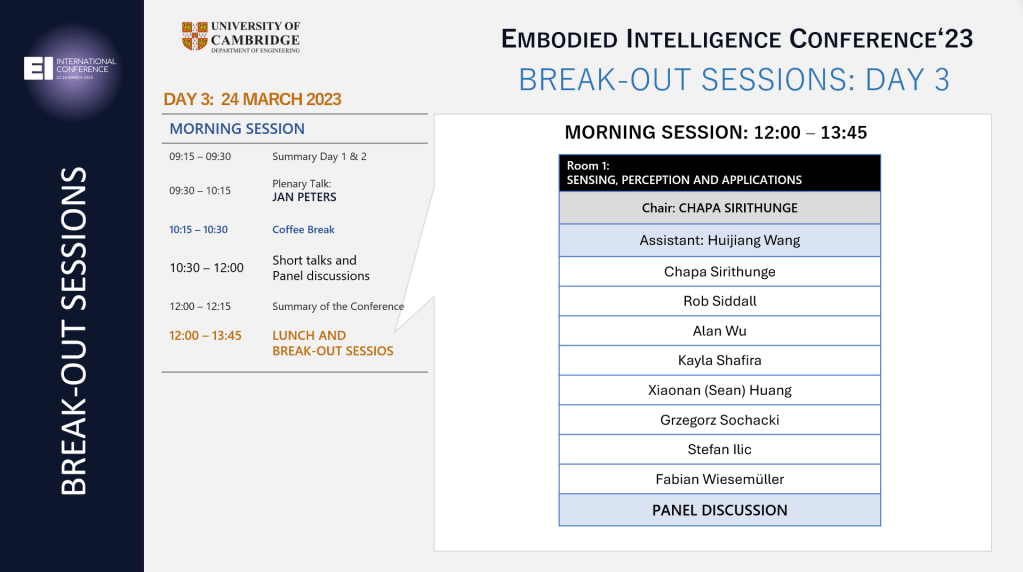
ROOM 1: SENSING, PERCEPTION AND APPLICATIONS
| Chapa Sirithunge | Chair’s Introduction & Talk |
| Rob Siddall | TBC |
| Alan Wu | Exposing Embodied Intelligence for Education |
| Kayla Shafira | TBC |
| Xiaonan (Sean) Huang | Towards an autonomous and intelligent tensegrity robot for unstructured terrains |
| Grzegorz Sochacki | Embodied Robotic Taste |
| Stefan Ilic | Robotic Optimization of Food |
| Fabian Wiesemüller | Hygroscopically driven transient actuators for environmental sensors deployment |
