MORNING MASTERCLASS & BREAK-OUT SESSIONS

MASTERCLASS III (BS 2-1-1): Non-linear Dynamics and Reservoir Computing with KOHEI NAKAJIMA
| Leone Costi | On the fly connectome as a computational reservoir |
| Fan Ye | Reservoir computing for robot control |
| Kai-Fung Chu | Physical computation in mobile swarm agents |
MORNING BREAK-OUT SESSIONS
BREAK-OUT SESSION 1 (BS 2-1-2)
| CHAIR: Dana Damian | Co-chairs: Xiang Wang |
| Oliver Brock | An Embodiment-Centric Approach to Robot Manipulation |
| Ronnie Videla Francisco Parada Claudio Aguayo | Embodied AI: Post-Cognitivist Reflections on the Role of Perception and Agency in Artificial Life Systems |
| Rajalakshmy Dr.P. | Kinematic Analysis of Yaskawa Motoman GP8 Serial Manipulator |
| Jie Wang | < Title needed > |
BREAK-OUT SESSION 2 (BS 2-1-3)
| CHAIR: Jerry Xu | Co-chairs: Catherine Merchant |
| Maria Elena Giannaccini | Soft Robots for Humans |
| Jialun Liu | Untethered Chemically-Driven Thermo-responsive Soft Robotic Capsule |
| Seyedreza Kashef Tabrizian | Autonomous self-healing in soft robotics via hardware multifunctionality |
| Sareum Kim | Bioinspired locomotion through compliant mechanism design |
| Jerry Xu | Embodied intelligence in civil engineering structures |
BREAK-OUT SESSION 3 (BS 2-1-4)
| CHAIR: Ryman Hashem | Co-chair: Xiang Wang |
| Antonia Georgopoulou | Sensor Development for Biohybrid Robots |
| Zihan Zhao | Ensemble Control of a 2-DOF Parallel Link Arm in a Capsule Robot Using Oscillating External Magnetic Fields |
| Haoyi Zhang | <Title needed > |
| Yi Zhang | <Title needed > |
AFTERNOON MASTERCLASS & BREAK-OUT SESSIONS
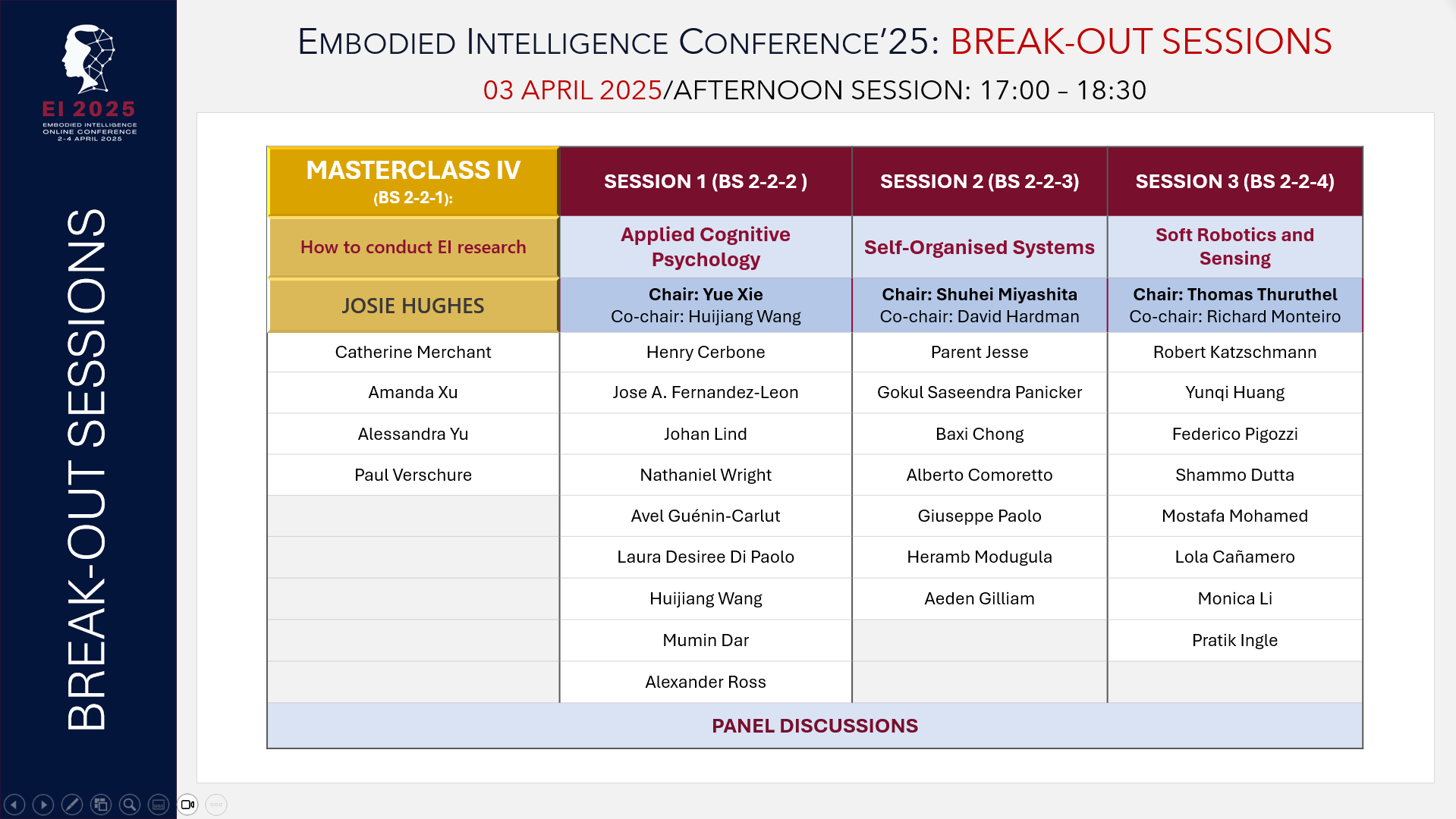
MASTERCLASS IV (BS 2-1-1): How to conduct EI research with JOSIE HUGHES
| Catherine Merchant | In-Situ Classification of Soil Types Exploiting Electrical Impedance Tomography with a Robotic Actuating Probe |
| Amanda Xu | Multi-layer EIT setup |
| Alessandra Yu | The Human Affectome |
| Paul Verschure | From Embodiment to Conscious Control: The Distributed Adaptive Control Framework |
AFTERNOON BREAK-OUT SESSIONS
BREAK-OUT SESSION 1 (BS 2-2-2)
| CHAIR: Yue Xie | Co-chair: Huijiang Wang |
| Henry Cerbone | An environmentally situated state-space model of embodied cognition |
| Jose A. Fernandez-Leon | Rethinking Behavioral Robustness: An Embodied and Relational Perspective |
| Johan Lind | Efficiency in animal memory systems: Does the sequence bottleneck solve the thinking bottleneck? |
| Nathaniel Wright | Magic as a paradigm for understanding embodied intelligence |
| Avel Guénin–Carlut | Things that think are things that grow – Contextuality, development, and (embodied) intelligence |
| Laura Desiree Di Paolo | Embodied and Educated |
| Huijiang Wang | Dexterity enhances the robotic expressiveness for piano playing |
| Mumin Dar | <Title needed > |
| Alexander Ross | Mirroring the Future of Embodied Intelligence: Science Fiction’s Prescience |
BREAK-OUT SESSION 2 (BS 2-2-3)
| CHAIR: Shuhei Miyashita | Co-chair: David Hardman |
| Parent Jesse | Navigating Time Through the Body: Embodied Intelligence, Narrative Agency, and the Challenge of Digiphrenia |
| Gokul Saseendra Panicker | Optisort – Nuclear Waste Pile Sorting |
| Baxi Chong | Embodied intelligence in robot locomotion, and the connection to information theory |
| Alberto Comoretto | Physical synchronization of soft self-oscillating limbs for fast and autonomous locomotion |
| Giuseppe Paolo | TAG: A Decentralized Framework for Multi-Agent Hierarchical Reinforcement Learning |
| Aeden Gilliam | Failure Biomechanics Data Collection: For Robots to Understand how to Respond in a Crisis |
| Heramb Modugula | <Title needed > |
BREAK-OUT SESSION 3 (BS 2-2-4)
| CHAIR: Thomas Thuruthel | Co-chair: Richard Monteiro |
| Robert Katzschmann | Living Robots: Modeling, Fabrication, and Embodied Intelligence |
| Yunqi Huang | Electrical Impedance Tomography Based Soft Artificial Skin for Robot Sensing |
| Federico Pigozzi | Associative Conditioning in Gene Regulatory Network Models Increases Integrative Causal Emergence |
| Shammo Dutta | Development and Validation of Computational \Modeling Framework for Tendon-based Soft Robotics |
| Mostafa Mohamed | Optimization and Reduction of an Anthropomorphic Prosthetic Hand Actuators based on Hand Motor Synergy |
| Lola Cañamero | <Title needed > |
| Monica Li | <Title needed > |
| Pratik Ingle | <Title needed > |
