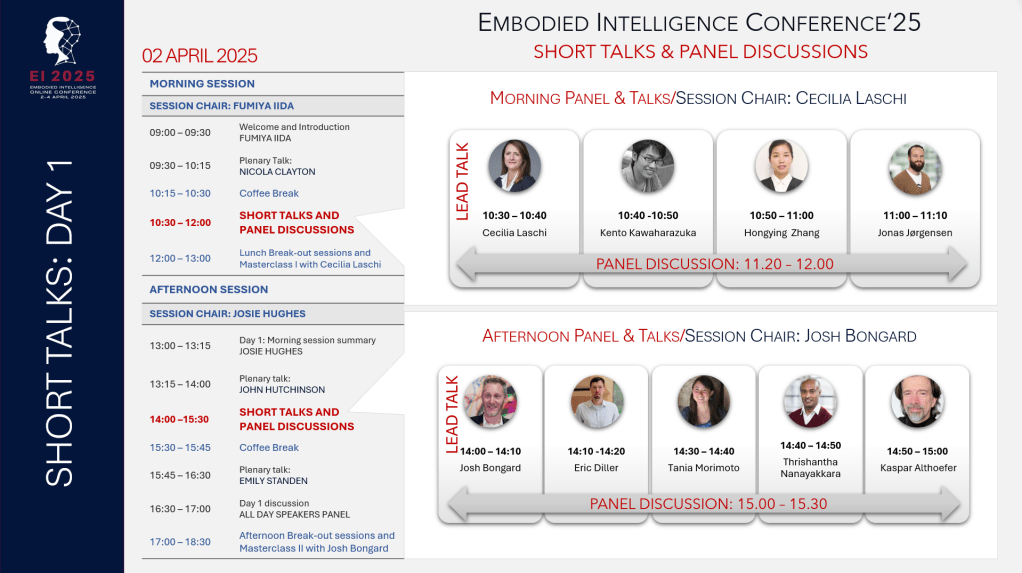
2 APRIL 2025
PLEASE NOTE THAT OWING TO COPYRIGHT OR INTELLECTUAL PROPERTY PERMISSIONS WE ARE UNABLE TO SHARE RECORDINGS OF SOME SESSIONS
VIDEO: INTRODUCTION AND WELCOME: Fumiya Iida (University of Cambridge, UK)
VIDEO: DAY 1, MORNING SESSION SUMMARY, Josie Hughes (EPFL)
VIDEO: DAY 1, AFTERNOON SESSION 2 and CLOSING PANEL DISCUSSION
PLENARY TALKS

NICOLA CLAYTON (University of Cambridge, UK)
VIDEO: MAGIC MIND
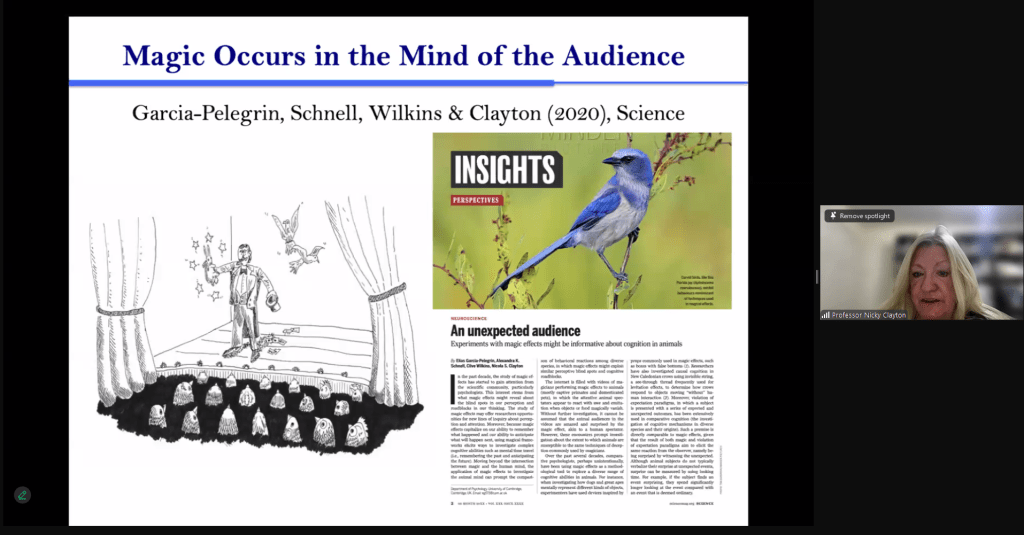
Abstract: Cognitive illusions reveal a number of fascinating features about the psychology and biology of the mind; not just perception and attention but also mental time travel, the ability to remember the past and anticipate the future. Magic effects also illuminate some important things about Theory of Mind, the ability to assess the thoughts of others, both on the part of the audience and on the part of the magician. In this talk I will evaluate the extent to which corvids, known for their impressive cognitive abilities, exploit such principles in their natural caching behaviour~ i.e., their ability to hide food and other valuable objects from the prying eyes of their competitors and protect their caches from being pilfered. I will also investigate whether and to what extent these birds are fooled by human magic effects. Finally, I will discuss what this approach might reveal about embodiment and specifically the intersection between the ability to manually produce an action and the ability to anticipate the actions of others: for sleight of hand magic capitalises on the observer’s predictions of specific biomechanical movements, particularly those of the fingers and thumbs.
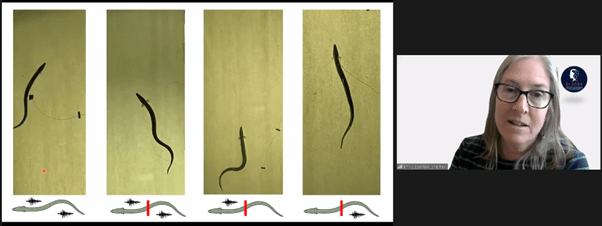
JOHN HUTCHINSON (RVC, University of London)
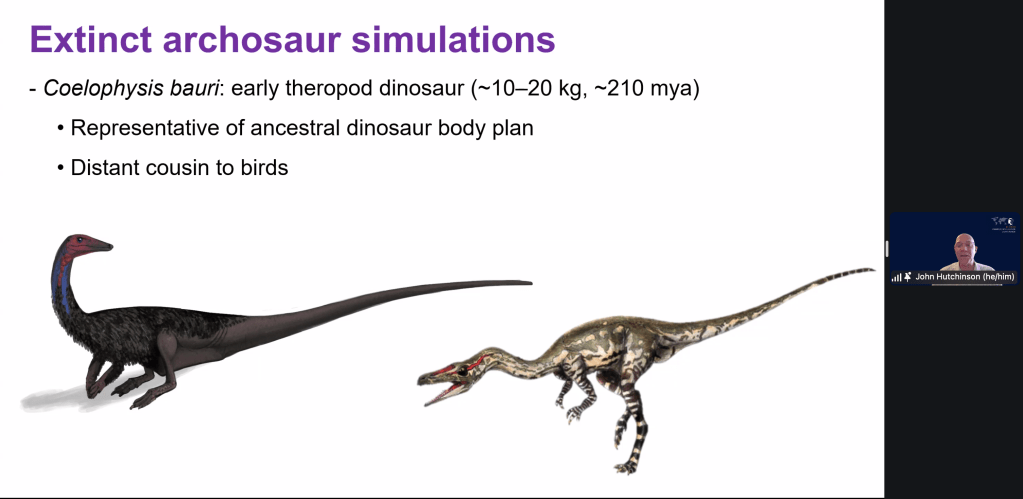
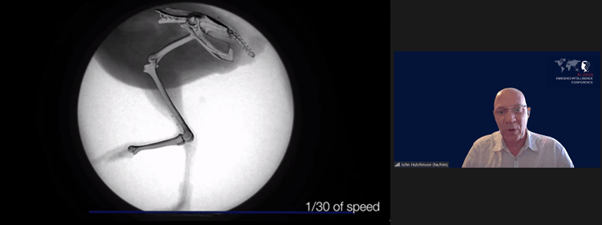
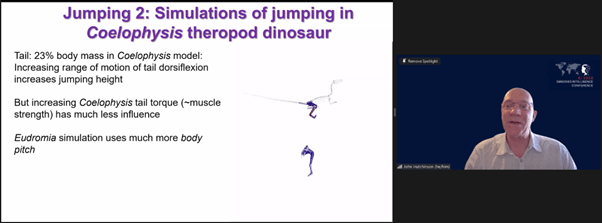
VIDEO: RECONSTRUCTING THE EVOLUTIONARY BIOMECHANICS OF TERRESTRIAL LOCOMOTION IN ARCHOSAURIA
Abstract: The Triassic Period of the Mesozoic Era (about 252-200 million years ago) was a time of great flourishing of the Archosauria: the group containing living crocodiles and birds and all descendants of their most recent common ancestor, which therefore includes extinct groups such as pterosaurs (winged reptiles) and Mesozoic dinosaurs. Furthermore, the crocodile lineage (Pseudosuchia) was about as diverse as the dinosaur lineage was during this time. But a mass extinction at the end of the Triassic wiped out much of that diversity, leaving only the crocodile, pterosaur and dinosaur lineages to survive. Different hypotheses propose to explain this pattern. One is that the dinosaur group had some superior ways of walking and running relative to Pseudosuchia. My team has used a combination of experimental studies of extant Crocodylia and Aves with modelling and simulation of the biomechanics of locomotion in extant and extinct archosaurs from numerous groups, put into an evolutionary context. I will summarise this research to date, showing how computer models and simulations of living animals do fairly well at predicting locomotor abilities, boosting confidence in usage of these for extinct animals. Indeed, simulations of extinct archosaurs show how well different morphologies may have been able to perform different behaviours, and how these behaviours evolved. While it remains unclear why some groups survived the Triassic-Jurassic mass extinction, there is preliminary evidence supporting the conclusion that early dinosaurs had some locomotor advantages relative to other groups.
EMILY STANDEN (University of Ottawa, Canada)
VIDEO: DIFFERENT ANIMALS, MULTIPLE ENVIRONMENTS AND AN EMERGING STORY ABOUT EMBODIED INTELLIGENCE
Abstract: Biological organisms have evolved over millions of years to successfully navigate dynamic and diverse environments; in essence the planet is a giant evolutionary experiment. Chemical and physical laws constrain biological systems and adaptive selection drives the continual ‘sorting’ of traits that allow animals to successfully outcompete their neighbours and pass on their genetic plans to their offspring. This reliance on inheritance ensures that helpful traits are passed along, but also limits the de novo addition of novel traits. This means that evolution results in animals that exapt function from their existing toolbox. Biological systems therefore are made of a limited number of tissue types, reused and retooled in often redundant features, that are constrained internally by biochemical principles and externally by physical laws. Although this seems like a haphazard approach to design, animals are a marvel of effective and often efficient, form and function. By observing the movement patterns of several very different animal models I will discuss how the mechanics of the environment, the mechanics of the animal’s morphology, and local sensory feedback in the system, might explain how complex gaits can emerge from a decentralized ‘tweaking’ of a limited number of neuro-control strategies.
MORNING SHORT TALKS (VIDEOS)
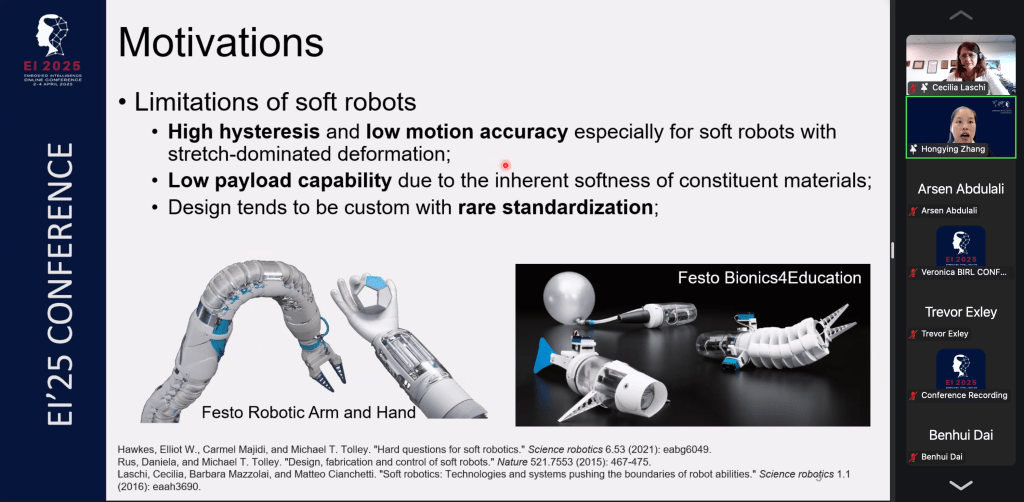
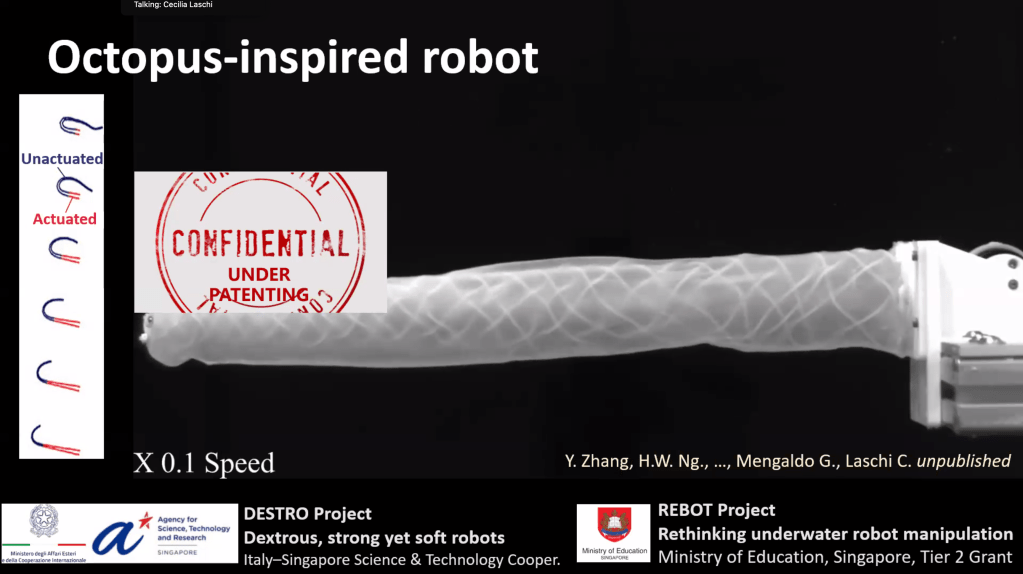
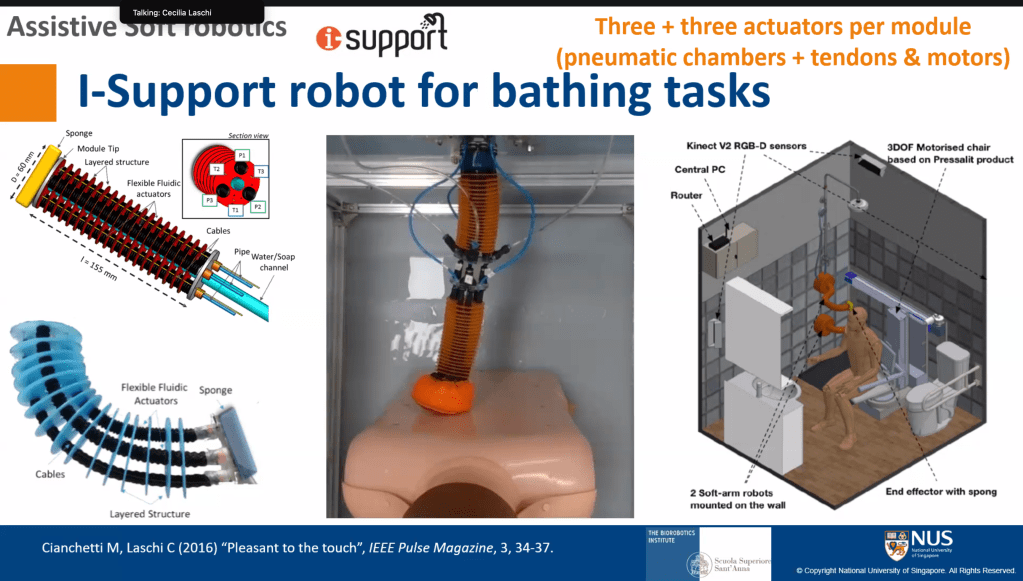
- Cecilia Laschi: TO CONTROL, OR NOT TO CONTROL- THAT IS THE QUESTION FOR SOFT ROBOTS WITH EMBODIED INTELLIGENCE
- Abstract: Embodied intelligence and soft robotics are deeply intertwined, as the deformability of soft body structures play a crucial role in generating emergent behaviours through interaction with the environment. One of the key contributions of embodied intelligence to robotics consists of simplifying control, particularly by distributing the control burden to the body and its interactions with external forces. In this approach, motor behaviours arise naturally from how the robot interacts with its surroundings, reducing the need for explicit, centralized control. However, while soft robots can exhibit emergent behaviours, we still wish to exert more direct control—particularly when it comes to soft robotic arms. For tasks like grasping, positioning the end effector or shaping the robot arm becomes essential. These control tasks present complex challenges that have captivated a growing research community in soft robotics. Unlike traditional, rigid robots, for which consolidated modelling and control techniques exist, soft robots require different modelling approaches, due to their deformable and flexible nature. In response to these challenges, model-free control approaches—often leveraging machine learning—have been widely adopted in soft robotics. These techniques allow robots to learn their own kinematics and dynamics, as well as their interactions with the environment, rather than relying on precise, pre-defined models. While these approaches are effective, recent advances in modelling soft body deformations have led to progress in model-based control. These methods aim to account for the complexities of soft materials and enable more predictable and controlled behaviours. Despite these advancements, one of the most intriguing possibilities in soft robotics is the development of robots that require no control at all. By exploiting the intrinsic properties of soft materials, such as instabilities, some soft robots can achieve movement through purely mechanical means—no electronics or complex control systems needed. These are extreme examples, where a constant input generates movements that are inherently determined by the robot design, demonstrating that control, in some cases, can be entirely outsourced to the robot physical structure. In soft robotics, there exists a wide spectrum of possibilities—from fully controlled systems to entirely control-free and electronics-free ones. Finding the optimal balance between these extremes is one of the key challenges in soft robot design. The trade-off between control levels is the central dilemma in the design process. The challenge is to determine when and how much control is necessary, given the robot tasks and the environment it interacts with.
- Kento Kawaharazuka: MUSCULOSKELETAL HUMANOIDS FOR HUMAN-LIKE EMBODIED INTELLIGENCE
- Abstract: In this talk, I will introduce various musculoskeletal humanoids we have developed to explore human-like embodied intelligence, along with their evolutionary advancements. I will discuss the body designs of Kenta, Kotaro, Kojiro, Kenshiro, Kengoro, and Musashi—each developed in pursuit of human-likeness—and highlight the advantages inherent in their musculoskeletal structures. In addition, I will present our latest research, including the mobile wire-driven robot CubiX, which goes beyond biomimicry by leveraging the properties of muscles to enable flexible wire arrangement — allowing dynamic changes in embodiment.
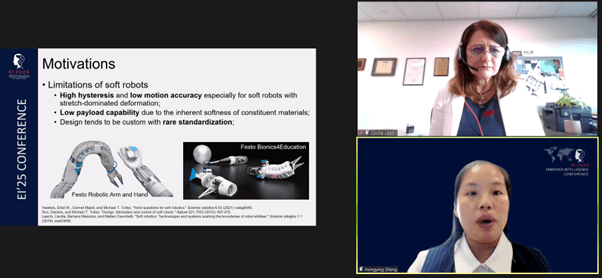
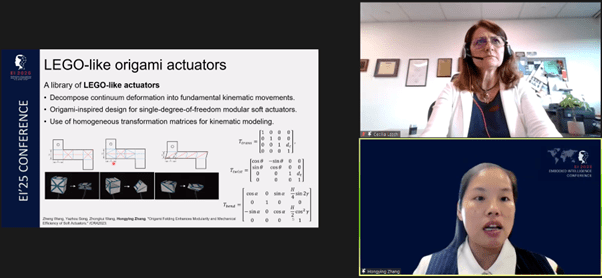
- Hongying Zhang: STANDARDIZING STRUCTURE DESIGN OF SOFT ROBOTS THROUGH ORIGAMI
- Abstract: While numerous soft robots have showcased their capabilities in manipulation and locomotion within laboratories and relevant environments, there remains a significant lack of standardization. This gap hinders the development of modular, off-the-shelf devices akin to their rigid counterparts. Origami structures, with carefully designed folding patterns, are capable of replicating all basic motion patterns—contraction/extension, bending, and twisting—while also promoting the standardization of designs into modular units. Our design approach consists of two key steps: developing a library of origami actuators for off-the-shelf use and assembling them into functional systems tailored to specific requirements. In pursuit of this paradigm, we have developed three origami actuator patterns capable of contraction, bending, and twisting under negative pressure. These actuators demonstrate durability, enduring over 10,000 loading cycles with repeatable positioning errors within 3%, and can exert a blocked force exceeding 60 N, evidencing high payload capacities. Moreover, we introduce an optimization-based inverse design algorithm that facilitates the automatic assembly of standardized actuators into functional robotic systems. We validated this algorithm with applications in manipulators for grasping, tight space inspection, and bipedal walking robots. This work advances the field of soft robotics by offering a standardized framework for the creation of origami-based, modular soft robots.
- Jonas Jørgensen: SOFT ROBOT AESTHETICS – EMBODIED MEANING-MAKING IN HUMAN-SOFT ROBOT INTERACTION
- Abstract: Soft robotics has provided an exciting new playground for a radically interdisciplinary type of robotics research that has broken with long held key assumptions and priorities of robotics. In this short talk, I will consider how aesthetic perspectives can also generate pertinent insights about soft robotics that so-called “hard science” overlooks. These may prove essential both for designing embodied intelligence in soft robots and for soft robotics technology successfully transitioning from basic research to real-world applications. Through a presentation of selected examples of our work, I will argue that considerations on aesthetics are a prerequisite for actualizing the full range of possibilities for intelligent interaction that soft robotics technology affords.
- PANEL DISCUSSION
AFTERNOON SHORT TALKS (VIDEOS)
- Josh Bongard: SNOWFLAKE ROBOTICS
- Abstract: Currently, we create and deploy massive numbers of identical instances of technology: computers with just three operating systems, a handful of autonomous vehicle makes and models. These monocultures can be easily overcome by intentional attacks or unforeseen environmental details. With autonomous robots, we have the opportunity to deploy machines in which no two share the same form or function, but all embody the same behavior in different ways. I will demonstrate how modern machine learning can design such ’snowflake robotics’, and how modern manufacturing can manufacture them.
- Eric Diller: PROGRAMMABLE MAGNETIC INTELLIGENCE IN TINY ROBOTS FOR MICRO-SCALE SURGERY
- Abstract: Micro-scale mobile robots can physically access small spaces in a versatile and non-invasive manner. Such microrobots under several mm in size have potential unique applications for surgery, sensing and drug delivery in healthcare, microfactories and as scientific tools.These devices are powered and controlled remotely using externally-applied magnetic fields for motion in 3D. This talk will introduce how we design and produce these tiny machines, as well as how we create magnetic fields that can move them as functional robots inside the body. Moving microrobots for swimming, crawling and grasping powered by these magnetic fields will be shown, along with our progress towards medical applications for diagnosis in the gut, and in neurosurgery.
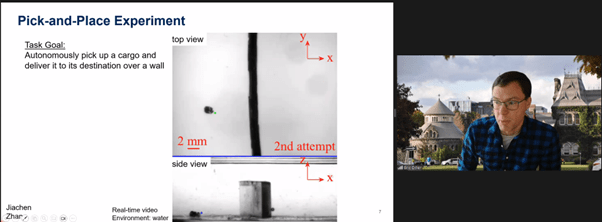
- Tania Morimoto: ENABLING ADVANCEMENTS IN MEDICAL CARE THROUGH THE DESIGN OF SOFT CONTINUUM ROBOTS
- Abstract: Flexible and soft robots have the potential for significant impact across a range of medical applications. In particular, soft continuum robots offer a promising alternative to conventional rigid-link robots in minimally invasive surgical applications, due to their ability to traverse confined spaces and conform to highly curved paths. They also offer potential for improved safety due to their inherent compliance. Recent work in this field has resulted in numerous advancements on all fronts, leading to robots with enhanced capabilities and improved performance. In this talk, I will focus on the area of soft continuum robot design – including the design of several new robotic systems from my lab.
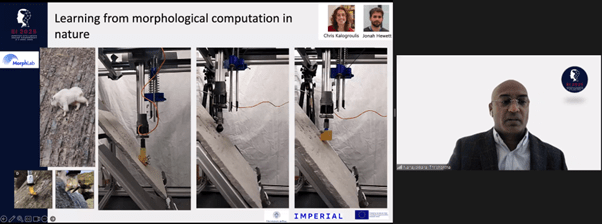
- Thrishantha Nanayakkara: ALGORITHMS IN PHYSICAL GHOST CIRCUITS FOR ROBOTS IN PARTIALLY KNOWN ENVIRONMENTS
- Abstract: In this talk, I will discuss the work in the Morphlab under the overarching question of understanding how passive dynamics of physical systems and the notion of computing can seamlessly come together to solve complex interaction problems. Structured around three pivotal phenomena—Ghost circuits, kinematic tuning, and behavioral lensing—I will discuss a theoretical framework essential for designing resilient physical robots and control systems, particularly in environments with partial knowledge
- Kaspar Althoefer: BIO-INSPIRED ROBOTICS: ADVANCING SURGICAL INNOVATION THROUGH EMBODIED INTELLIGENCE
- Abstract: Nature has long served as a source of inspiration for robotics, offering solutions refined by evolutionary processes to optimize interaction with the physical world. In the field of surgical robotics, bio-inspired approaches are driving groundbreaking advancements, particularly through soft robotic structures that mimic the adaptability and dexterity of biological organisms. This talk will explore developments in soft robotics, focusing on fluidically actuated systems inspired by the movement of octopus arms and the tip growth in snails. These innovations enable unprecedented access to challenging environments, offering safer and more effective solutions for surgical applications. I will discuss key technical challenges, recent breakthroughs, and ongoing research efforts in bio-robotics. I will report on the EU project STIFF-FLOP and its influence on current initiatives, including EU project PALPABLE and the ERC Synergy Grant EndoTheranostics. These projects aim to revolutionize in-situ cancer diagnosis and treatment through advanced bio-robotic solutions, highlighting the transformative potential of embodied intelligence in robotics for minimally invasive surgery.
- PANEL DISCUSSION
CLICK ON IMAGES TO ENLARGE